 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboCasa: Large-Scale Simulation of Everyday Tasks for Generalist Robots
Jun 04, 2024Recent advancements in Artificial Intelligence (AI) have largely been propelled by scaling. In Robotics, scaling is hindered by the lack of access to massive robot datasets. We advocate using realistic physical simulation as a means to scale environments, tasks, and datasets for robot learning methods. We present RoboCasa, a large-scale simulation framework for training generalist robots in everyday environments. RoboCasa features realistic and diverse scenes focusing on kitchen environments. We provide thousands of 3D assets across over 150 object categories and dozens of interactable furniture and appliances. We enrich the realism and diversity of our simulation with generative AI tools, such as object assets from text-to-3D models and environment textures from text-to-image models. We design a set of 100 tasks for systematic evaluation, including composite tasks generated by the guidance of large language models. To facilitate learning, we provide high-quality human demonstrations and integrate automated trajectory generation methods to substantially enlarge our datasets with minimal human burden. Our experiments show a clear scaling trend in using synthetically generated robot data for large-scale imitation learning and show great promise in harnessing simulation data in real-world tasks. Videos and open-source code are available at https://robocasa.ai/
Measure of Uncertainty in Human Emotions
Aug 08, 2023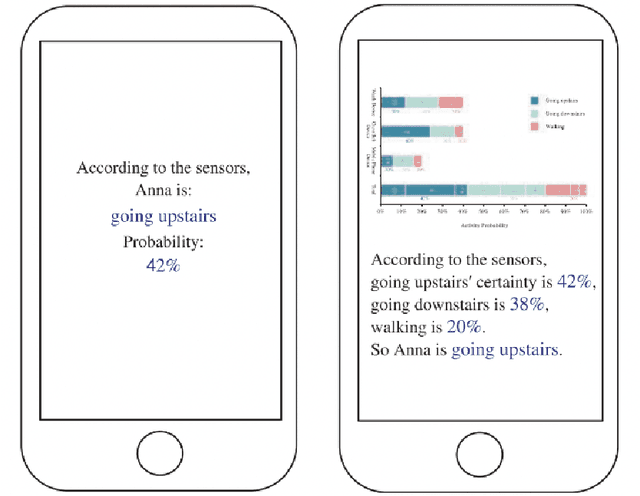
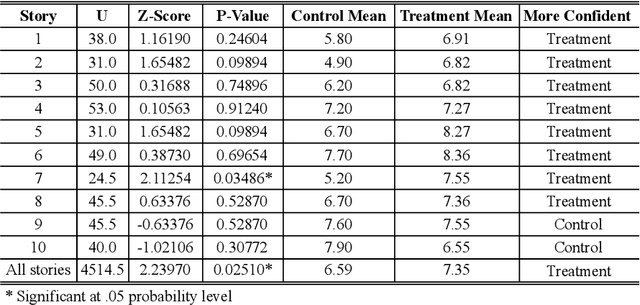
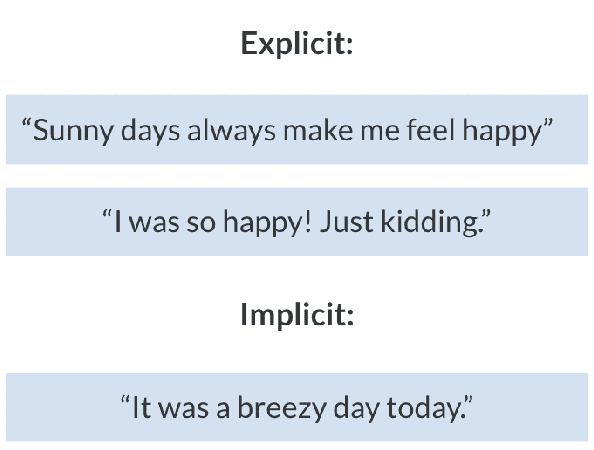

Many research explore how well computers are able to examine emotions displayed by humans and use that data to perform different tasks. However, there have been very few research which evaluate the computers ability to generate emotion classification information in an attempt to help the user make decisions or perform tasks. This is a crucial area to explore as it is paramount to the two way communication between humans and computers. This research conducted an experiment to investigate the impact of different uncertainty information displays of emotion classification on the human decision making process. Results show that displaying more uncertainty information can help users to be more confident when making decisions.
Robot Learning on the Job: Human-in-the-Loop Autonomy and Learning During Deployment
Nov 15, 2022



With the rapid growth of computing powers and recent advances in deep learning, we have witnessed impressive demonstrations of novel robot capabilities in research settings. Nonetheless, these learning systems exhibit brittle generalization and require excessive training data for practical tasks. To harness the capabilities of state-of-the-art robot learning models while embracing their imperfections, we present Sirius, a principled framework for humans and robots to collaborate through a division of work. In this framework, partially autonomous robots are tasked with handling a major portion of decision-making where they work reliably; meanwhile, human operators monitor the process and intervene in challenging situations. Such a human-robot team ensures safe deployments in complex tasks. Further, we introduce a new learning algorithm to improve the policy's performance on the data collected from the task executions. The core idea is re-weighing training samples with approximated human trust and optimizing the policies with weighted behavioral cloning. We evaluate Sirius in simulation and on real hardware, showing that Sirius consistently outperforms baselines over a collection of contact-rich manipulation tasks, achieving 8% boost in simulation and 27% on real hardware than the state-of-the-art methods, with 3 times faster convergence and 15% memory size. Videos and code are available at https://ut-austin-rpl.github.io/sirius/