 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinear Revolution-Invariance: Modeling and Deblurring Spatially-Varying Imaging Systems
Jun 17, 2022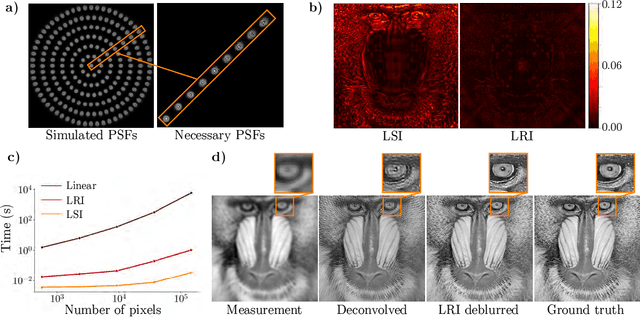
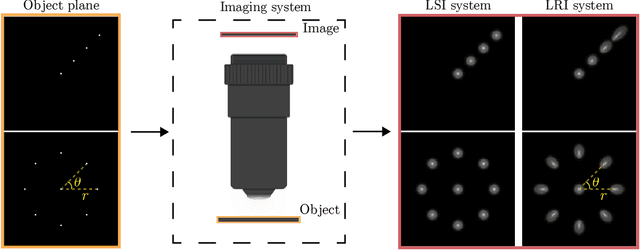
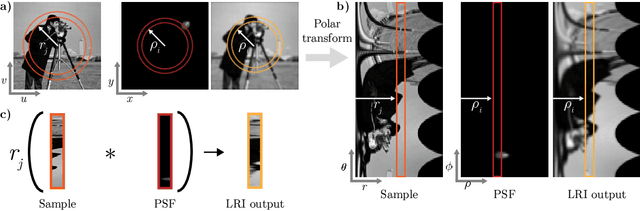
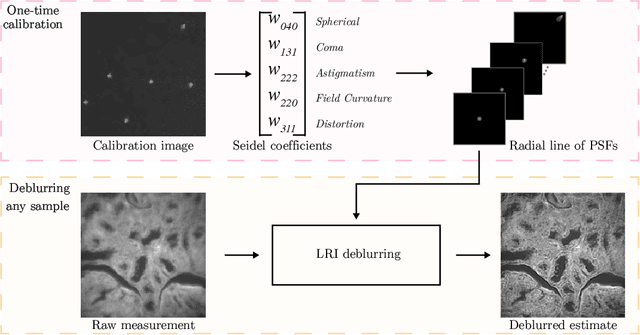
We develop theory and algorithms for modeling and deblurring imaging systems that are composed of rotationally-symmetric optics. Such systems have point spread functions (PSFs) which are spatially-varying, but only vary radially, a property we call linear revolution-invariance (LRI). From the LRI property we develop an exact theory for linear imaging with radially-varying optics, including an analog of the Fourier Convolution Theorem. This theory, in tandem with a calibration procedure using Seidel aberration coefficients, yields an efficient forward model and deblurring algorithm which requires only a single calibration image -- one that is easier to measure than a single PSF. We test these methods in simulation and experimentally on images of resolution targets, rabbit liver tissue, and live tardigrades obtained using the UCLA Miniscope v3. We find that the LRI forward model generates accurate radially-varying blur, and LRI deblurring improves resolution, especially near the edges of the field-of-view. These methods are available for use as a Python package at https://github.com/apsk14/lri.
Miniscope3D: optimized single-shot miniature 3D fluorescence microscopy
Oct 12, 2020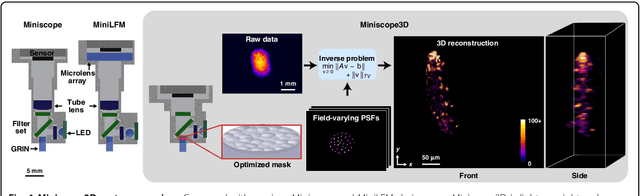
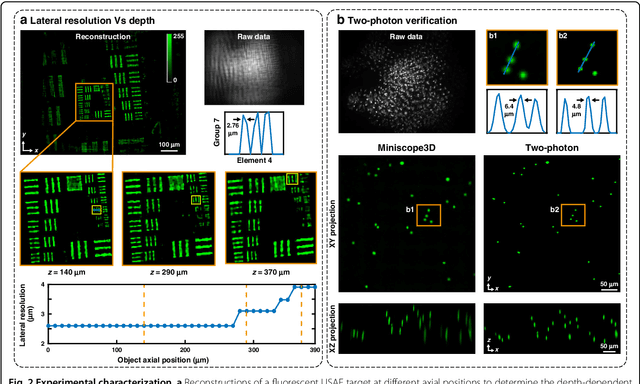
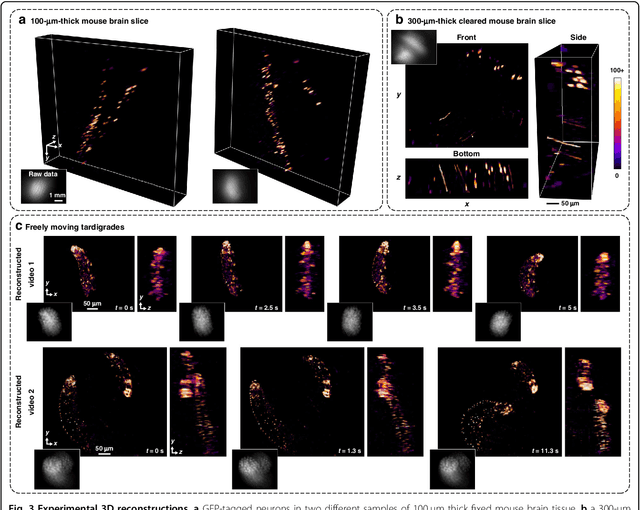

Miniature fluorescence microscopes are a standard tool in systems biology. However, widefield miniature microscopes capture only 2D information, and modifications that enable 3D capabilities increase the size and weight and have poor resolution outside a narrow depth range. Here, we achieve the 3D capability by replacing the tube lens of a conventional 2D Miniscope with an optimized multifocal phase mask at the objective's aperture stop. Placing the phase mask at the aperture stop significantly reduces the size of the device, and varying the focal lengths enables a uniform resolution across a wide depth range. The phase mask encodes the 3D fluorescence intensity into a single 2D measurement, and the 3D volume is recovered by solving a sparsity-constrained inverse problem. We provide methods for designing and fabricating the phase mask and an efficient forward model that accounts for the field-varying aberrations in miniature objectives. We demonstrate a prototype that is 17 mm tall and weighs 2.5 grams, achieving 2.76 $\mu$m lateral, and 15 $\mu$m axial resolution across most of the 900x700x390 $\mu m^3$ volume at 40 volumes per second. The performance is validated experimentally on resolution targets, dynamic biological samples, and mouse brain tissue. Compared with existing miniature single-shot volume-capture implementations, our system is smaller and lighter and achieves a more than 2x better lateral and axial resolution throughout a 10x larger usable depth range. Our microscope design provides single-shot 3D imaging for applications where a compact platform matters, such as volumetric neural imaging in freely moving animals and 3D motion studies of dynamic samples in incubators and lab-on-a-chip devices.
* Published with Nature Springer in Light: Science and Applications
Spectral DiffuserCam: lensless snapshot hyperspectral imaging with a spectral filter array
Jun 15, 2020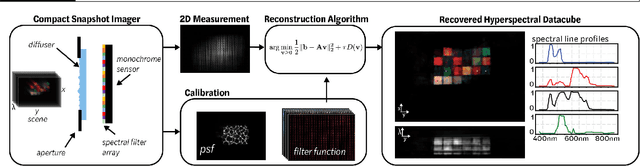
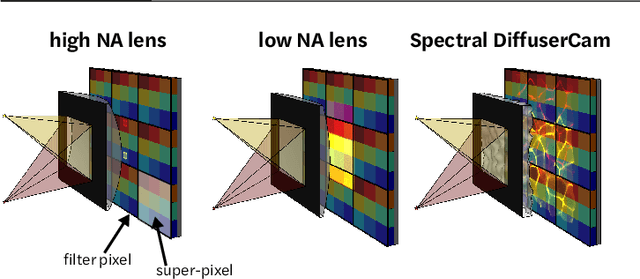
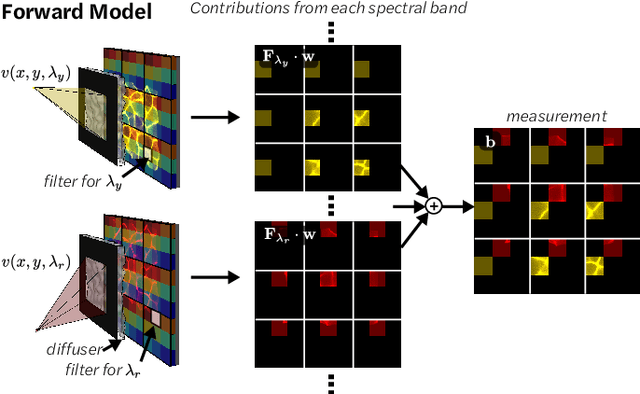
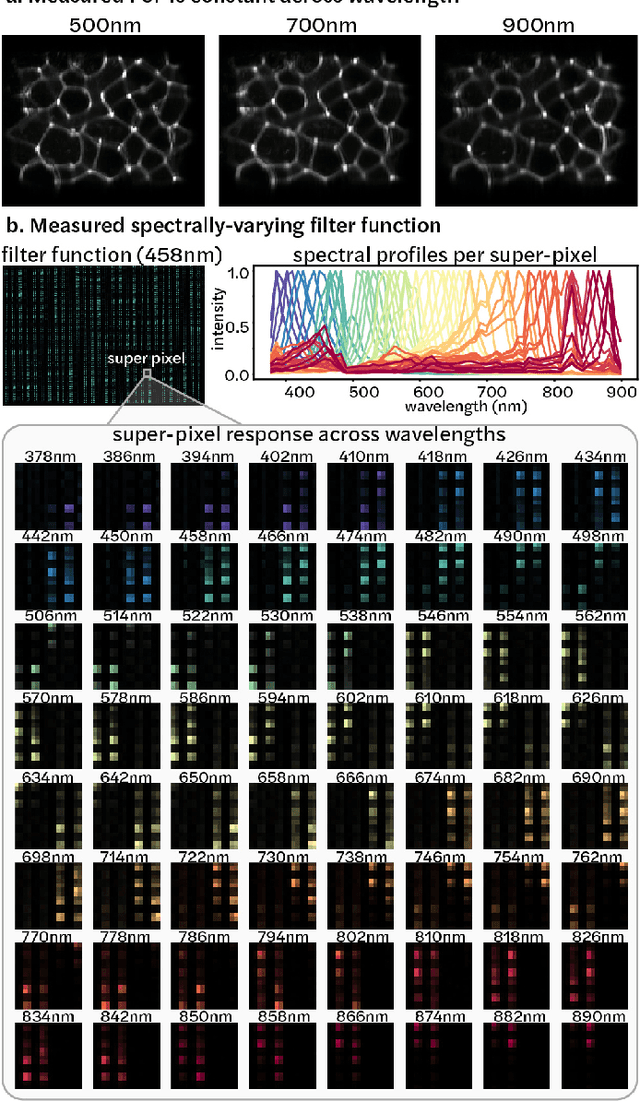
Hyperspectral imaging is useful for applications ranging from medical diagnostics to crop monitoring; however, traditional scanning hyperspectral imagers are prohibitively slow and expensive for widespread adoption. Snapshot techniques exist but are often confined to bulky benchtop setups or have low spatio-spectral resolution. In this paper, we propose a novel, compact, and inexpensive computational camera for snapshot hyperspectral imaging. Our system consists of a repeated spectral filter array placed directly on the image sensor and a diffuser placed close to the sensor. Each point in the world maps to a unique pseudorandom pattern on the spectral filter array, which encodes multiplexed spatio-spectral information. A sparsity-constrained inverse problem solver then recovers the hyperspectral volume with good spatio-spectral resolution. By using a spectral filter array, our hyperspectral imaging framework is flexible and can be designed with contiguous or non-contiguous spectral filters that can be chosen for a given application. We provide theory for system design, demonstrate a prototype device, and present experimental results with high spatio-spectral resolution.
Learned reconstructions for practical mask-based lensless imaging
Aug 30, 2019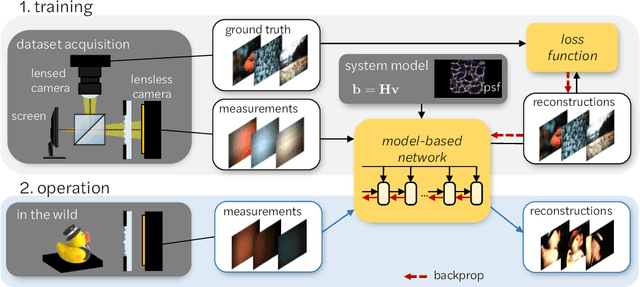
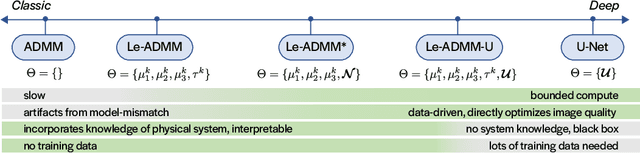
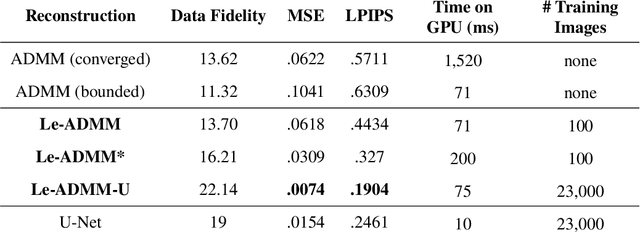
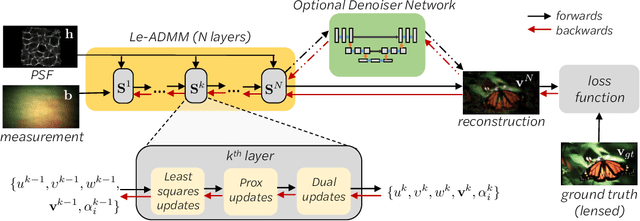
Mask-based lensless imagers are smaller and lighter than traditional lensed cameras. In these imagers, the sensor does not directly record an image of the scene; rather, a computational algorithm reconstructs it. Typically, mask-based lensless imagers use a model-based reconstruction approach that suffers from long compute times and a heavy reliance on both system calibration and heuristically chosen denoisers. In this work, we address these limitations using a bounded-compute, trainable neural network to reconstruct the image. We leverage our knowledge of the physical system by unrolling a traditional model-based optimization algorithm, whose parameters we optimize using experimentally gathered ground-truth data. Optionally, images produced by the unrolled network are then fed into a jointly-trained denoiser. As compared to traditional methods, our architecture achieves better perceptual image quality and runs 20x faster, enabling interactive previewing of the scene. We explore a spectrum between model-based and deep learning methods, showing the benefits of using an intermediate approach. Finally, we test our network on images taken in the wild with a prototype mask-based camera, demonstrating that our network generalizes to natural images.