 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUncertainty-Aware Trajectory Prediction via Rule-Regularized Heteroscedastic Deep Classification
Apr 17, 2025



Deep learning-based trajectory prediction models have demonstrated promising capabilities in capturing complex interactions. However, their out-of-distribution generalization remains a significant challenge, particularly due to unbalanced data and a lack of enough data and diversity to ensure robustness and calibration. To address this, we propose SHIFT (Spectral Heteroscedastic Informed Forecasting for Trajectories), a novel framework that uniquely combines well-calibrated uncertainty modeling with informative priors derived through automated rule extraction. SHIFT reformulates trajectory prediction as a classification task and employs heteroscedastic spectral-normalized Gaussian processes to effectively disentangle epistemic and aleatoric uncertainties. We learn informative priors from training labels, which are automatically generated from natural language driving rules, such as stop rules and drivability constraints, using a retrieval-augmented generation framework powered by a large language model. Extensive evaluations over the nuScenes dataset, including challenging low-data and cross-location scenarios, demonstrate that SHIFT outperforms state-of-the-art methods, achieving substantial gains in uncertainty calibration and displacement metrics. In particular, our model excels in complex scenarios, such as intersections, where uncertainty is inherently higher. Project page: https://kumarmanas.github.io/SHIFT/.
* 17 Pages, 9 figures. Accepted to Robotics: Science and Systems(RSS), 2025
CoT-TL: Low-Resource Temporal Knowledge Representation of Planning Instructions Using Chain-of-Thought Reasoning
Oct 21, 2024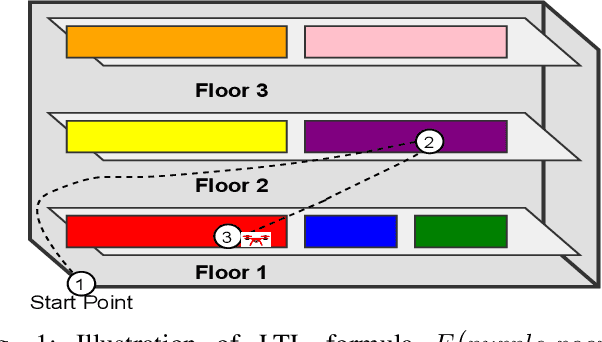
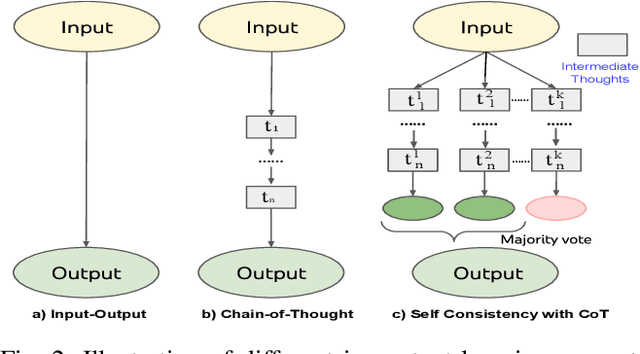
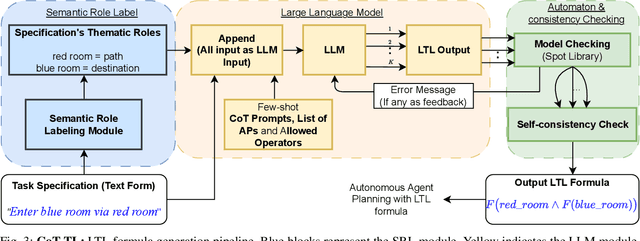
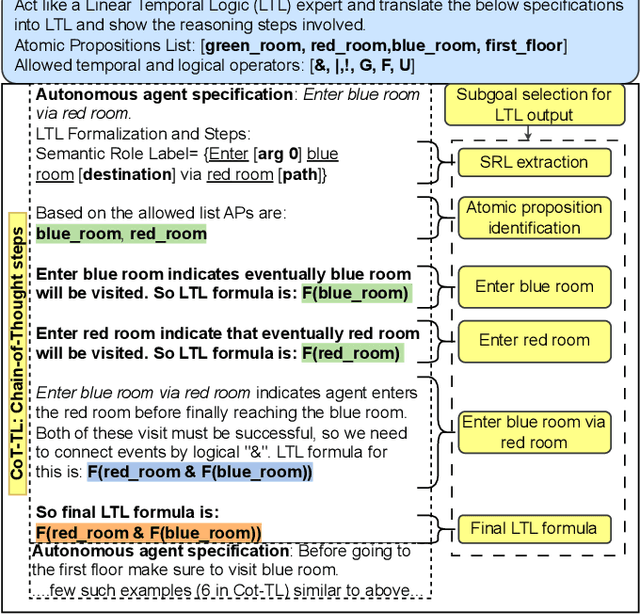
Autonomous agents often face the challenge of interpreting uncertain natural language instructions for planning tasks. Representing these instructions as Linear Temporal Logic (LTL) enables planners to synthesize actionable plans. We introduce CoT-TL, a data-efficient in-context learning framework for translating natural language specifications into LTL representations. CoT-TL addresses the limitations of large language models, which typically rely on extensive fine-tuning data, by extending chain-of-thought reasoning and semantic roles to align with the requirements of formal logic creation. This approach enhances the transparency and rationale behind LTL generation, fostering user trust. CoT-TL achieves state-of-the-art accuracy across three diverse datasets in low-data scenarios, outperforming existing methods without fine-tuning or intermediate translations. To improve reliability and minimize hallucinations, we incorporate model checking to validate the syntax of the generated LTL output. We further demonstrate CoT-TL's effectiveness through ablation studies and evaluations on unseen LTL structures and formulas in a new dataset. Finally, we validate CoT-TL's practicality by integrating it into a QuadCopter for multi-step drone planning based on natural language instructions.
TR2MTL: LLM based framework for Metric Temporal Logic Formalization of Traffic Rules
Jun 09, 2024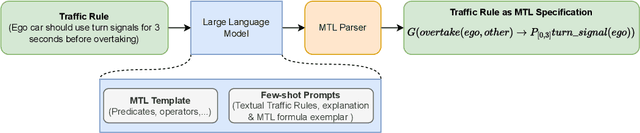
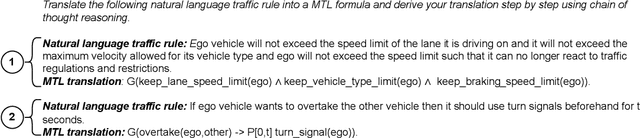
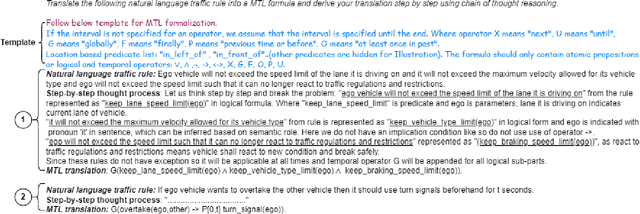
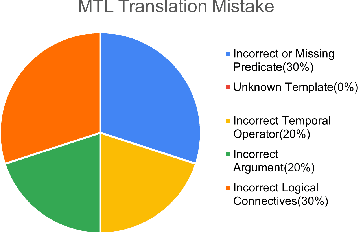
Traffic rules formalization is crucial for verifying the compliance and safety of autonomous vehicles (AVs). However, manual translation of natural language traffic rules as formal specification requires domain knowledge and logic expertise, which limits its adaptation. This paper introduces TR2MTL, a framework that employs large language models (LLMs) to automatically translate traffic rules (TR) into metric temporal logic (MTL). It is envisioned as a human-in-loop system for AV rule formalization. It utilizes a chain-of-thought in-context learning approach to guide the LLM in step-by-step translation and generating valid and grammatically correct MTL formulas. It can be extended to various forms of temporal logic and rules. We evaluated the framework on a challenging dataset of traffic rules we created from various sources and compared it against LLMs using different in-context learning methods. Results show that TR2MTL is domain-agnostic, achieving high accuracy and generalization capability even with a small dataset. Moreover, the method effectively predicts formulas with varying degrees of logical and semantic structure in unstructured traffic rules.