 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCoT-TL: Low-Resource Temporal Knowledge Representation of Planning Instructions Using Chain-of-Thought Reasoning
Paper and Code
Oct 21, 2024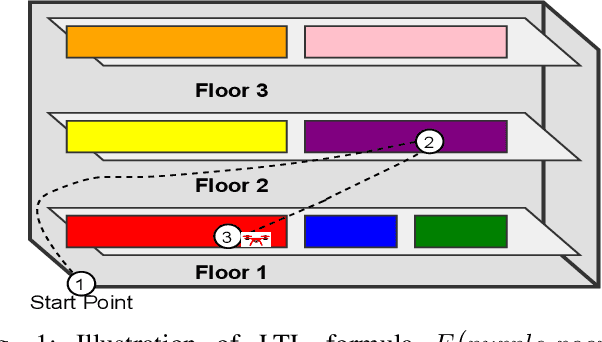
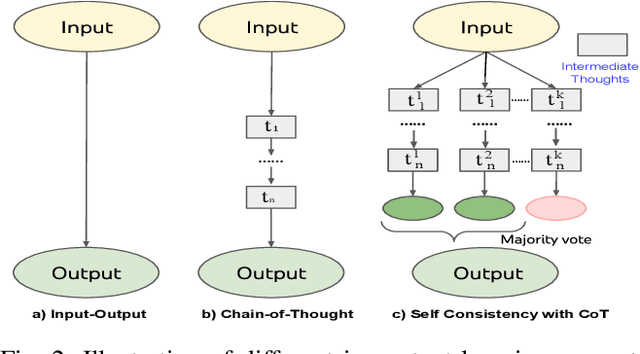
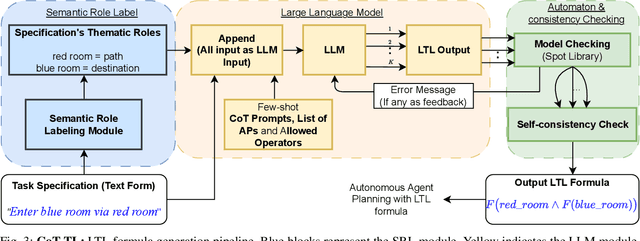
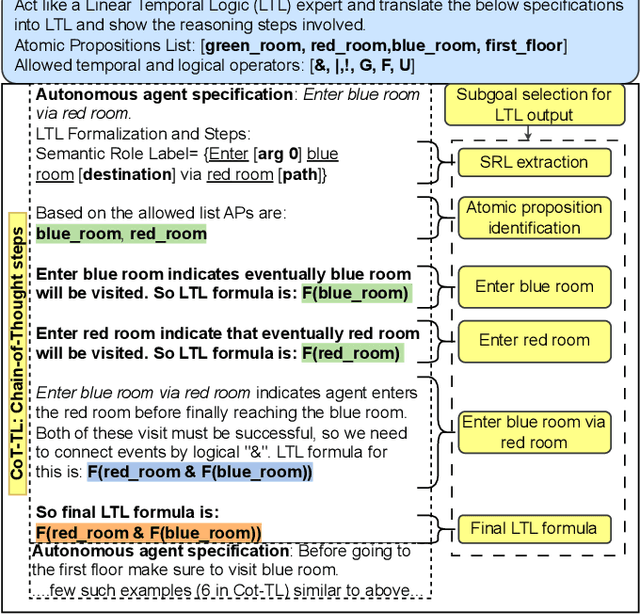
Autonomous agents often face the challenge of interpreting uncertain natural language instructions for planning tasks. Representing these instructions as Linear Temporal Logic (LTL) enables planners to synthesize actionable plans. We introduce CoT-TL, a data-efficient in-context learning framework for translating natural language specifications into LTL representations. CoT-TL addresses the limitations of large language models, which typically rely on extensive fine-tuning data, by extending chain-of-thought reasoning and semantic roles to align with the requirements of formal logic creation. This approach enhances the transparency and rationale behind LTL generation, fostering user trust. CoT-TL achieves state-of-the-art accuracy across three diverse datasets in low-data scenarios, outperforming existing methods without fine-tuning or intermediate translations. To improve reliability and minimize hallucinations, we incorporate model checking to validate the syntax of the generated LTL output. We further demonstrate CoT-TL's effectiveness through ablation studies and evaluations on unseen LTL structures and formulas in a new dataset. Finally, we validate CoT-TL's practicality by integrating it into a QuadCopter for multi-step drone planning based on natural language instructions.