 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSpatial-Temporal Aware Visuomotor Diffusion Policy Learning
Jul 09, 2025Visual imitation learning is effective for robots to learn versatile tasks. However, many existing methods rely on behavior cloning with supervised historical trajectories, limiting their 3D spatial and 4D spatiotemporal awareness. Consequently, these methods struggle to capture the 3D structures and 4D spatiotemporal relationships necessary for real-world deployment. In this work, we propose 4D Diffusion Policy (DP4), a novel visual imitation learning method that incorporates spatiotemporal awareness into diffusion-based policies. Unlike traditional approaches that rely on trajectory cloning, DP4 leverages a dynamic Gaussian world model to guide the learning of 3D spatial and 4D spatiotemporal perceptions from interactive environments. Our method constructs the current 3D scene from a single-view RGB-D observation and predicts the future 3D scene, optimizing trajectory generation by explicitly modeling both spatial and temporal dependencies. Extensive experiments across 17 simulation tasks with 173 variants and 3 real-world robotic tasks demonstrate that the 4D Diffusion Policy (DP4) outperforms baseline methods, improving the average simulation task success rate by 16.4% (Adroit), 14% (DexArt), and 6.45% (RLBench), and the average real-world robotic task success rate by 8.6%.
RAG-6DPose: Retrieval-Augmented 6D Pose Estimation via Leveraging CAD as Knowledge Base
Jun 23, 2025Accurate 6D pose estimation is key for robotic manipulation, enabling precise object localization for tasks like grasping. We present RAG-6DPose, a retrieval-augmented approach that leverages 3D CAD models as a knowledge base by integrating both visual and geometric cues. Our RAG-6DPose roughly contains three stages: 1) Building a Multi-Modal CAD Knowledge Base by extracting 2D visual features from multi-view CAD rendered images and also attaching 3D points; 2) Retrieving relevant CAD features from the knowledge base based on the current query image via our ReSPC module; and 3) Incorporating retrieved CAD information to refine pose predictions via retrieval-augmented decoding. Experimental results on standard benchmarks and real-world robotic tasks demonstrate the effectiveness and robustness of our approach, particularly in handling occlusions and novel viewpoints. Supplementary material is available on our project website: https://sressers.github.io/RAG-6DPose .
Sequential Multi-Object Grasping with One Dexterous Hand
Mar 12, 2025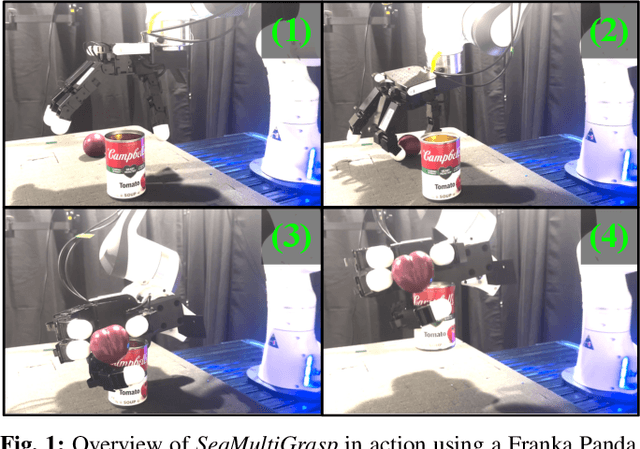
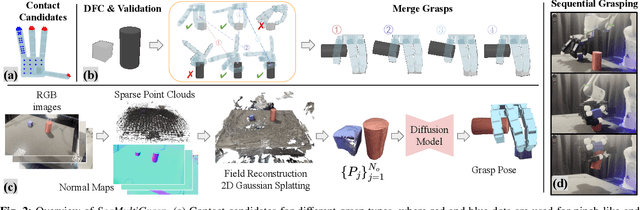
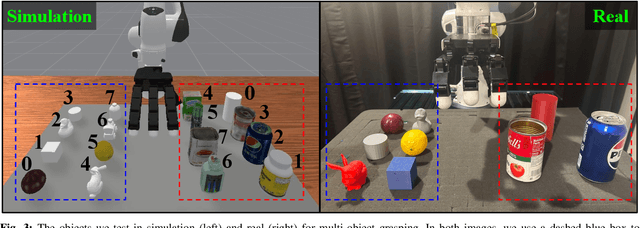
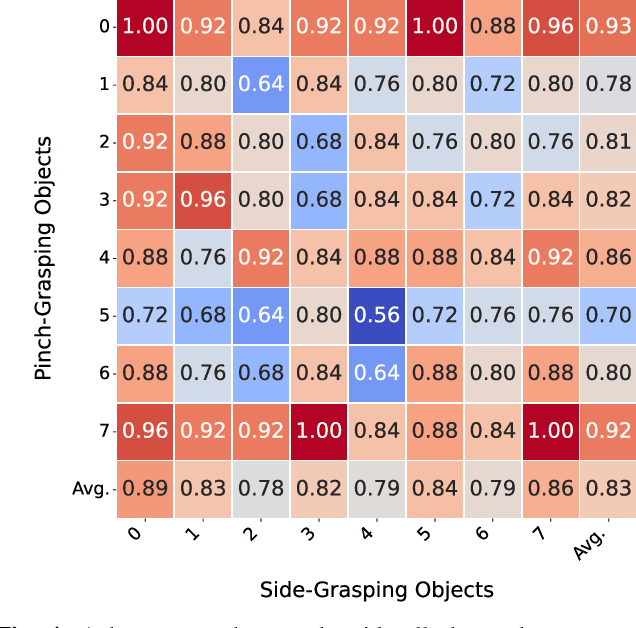
Sequentially grasping multiple objects with multi-fingered hands is common in daily life, where humans can fully leverage the dexterity of their hands to enclose multiple objects. However, the diversity of object geometries and the complex contact interactions required for high-DOF hands to grasp one object while enclosing another make sequential multi-object grasping challenging for robots. In this paper, we propose SeqMultiGrasp, a system for sequentially grasping objects with a four-fingered Allegro Hand. We focus on sequentially grasping two objects, ensuring that the hand fully encloses one object before lifting it and then grasps the second object without dropping the first. Our system first synthesizes single-object grasp candidates, where each grasp is constrained to use only a subset of the hand's links. These grasps are then validated in a physics simulator to ensure stability and feasibility. Next, we merge the validated single-object grasp poses to construct multi-object grasp configurations. For real-world deployment, we train a diffusion model conditioned on point clouds to propose grasp poses, followed by a heuristic-based execution strategy. We test our system using $8 \times 8$ object combinations in simulation and $6 \times 3$ object combinations in real. Our diffusion-based grasp model obtains an average success rate of 65.8% over 1600 simulation trials and 56.7% over 90 real-world trials, suggesting that it is a promising approach for sequential multi-object grasping with multi-fingered hands. Supplementary material is available on our project website: https://hesic73.github.io/SeqMultiGrasp.
DiffusionBERT: Improving Generative Masked Language Models with Diffusion Models
Nov 30, 2022We present DiffusionBERT, a new generative masked language model based on discrete diffusion models. Diffusion models and many pre-trained language models have a shared training objective, i.e., denoising, making it possible to combine the two powerful models and enjoy the best of both worlds. On the one hand, diffusion models offer a promising training strategy that helps improve the generation quality. On the other hand, pre-trained denoising language models (e.g., BERT) can be used as a good initialization that accelerates convergence. We explore training BERT to learn the reverse process of a discrete diffusion process with an absorbing state and elucidate several designs to improve it. First, we propose a new noise schedule for the forward diffusion process that controls the degree of noise added at each step based on the information of each token. Second, we investigate several designs of incorporating the time step into BERT. Experiments on unconditional text generation demonstrate that DiffusionBERT achieves significant improvement over existing diffusion models for text (e.g., D3PM and Diffusion-LM) and previous generative masked language models in terms of perplexity and BLEU score.