 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiffusion-Guided Gaussian Splatting for Large-Scale Unconstrained 3D Reconstruction and Novel View Synthesis
Apr 02, 2025Recent advancements in 3D Gaussian Splatting (3DGS) and Neural Radiance Fields (NeRF) have achieved impressive results in real-time 3D reconstruction and novel view synthesis. However, these methods struggle in large-scale, unconstrained environments where sparse and uneven input coverage, transient occlusions, appearance variability, and inconsistent camera settings lead to degraded quality. We propose GS-Diff, a novel 3DGS framework guided by a multi-view diffusion model to address these limitations. By generating pseudo-observations conditioned on multi-view inputs, our method transforms under-constrained 3D reconstruction problems into well-posed ones, enabling robust optimization even with sparse data. GS-Diff further integrates several enhancements, including appearance embedding, monocular depth priors, dynamic object modeling, anisotropy regularization, and advanced rasterization techniques, to tackle geometric and photometric challenges in real-world settings. Experiments on four benchmarks demonstrate that GS-Diff consistently outperforms state-of-the-art baselines by significant margins.
Cross-View Visual Geo-Localization for Outdoor Augmented Reality
Mar 28, 2023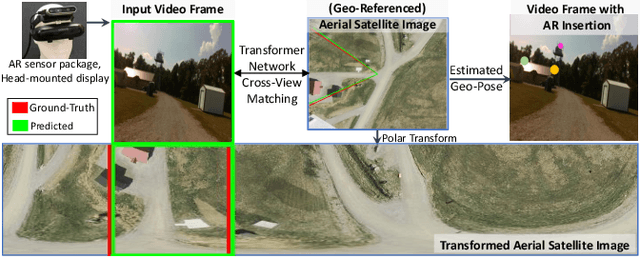



Precise estimation of global orientation and location is critical to ensure a compelling outdoor Augmented Reality (AR) experience. We address the problem of geo-pose estimation by cross-view matching of query ground images to a geo-referenced aerial satellite image database. Recently, neural network-based methods have shown state-of-the-art performance in cross-view matching. However, most of the prior works focus only on location estimation, ignoring orientation, which cannot meet the requirements in outdoor AR applications. We propose a new transformer neural network-based model and a modified triplet ranking loss for joint location and orientation estimation. Experiments on several benchmark cross-view geo-localization datasets show that our model achieves state-of-the-art performance. Furthermore, we present an approach to extend the single image query-based geo-localization approach by utilizing temporal information from a navigation pipeline for robust continuous geo-localization. Experimentation on several large-scale real-world video sequences demonstrates that our approach enables high-precision and stable AR insertion.