 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning Deep Convolutional Neural Networks for Continuous Object Orientation Estimation
Feb 06, 2017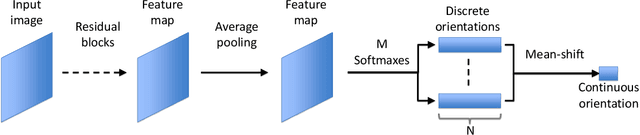

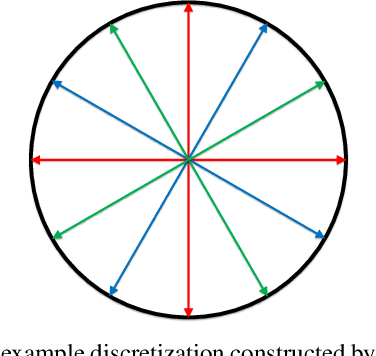

Deep Convolutional Neural Networks (DCNN) have been proven to be effective for various computer vision problems. In this work, we demonstrate its effectiveness on a continuous object orientation estimation task, which requires prediction of 0 to 360 degrees orientation of the objects. We do so by proposing and comparing three continuous orientation prediction approaches designed for the DCNNs. The first two approaches work by representing an orientation as a point on a unit circle and minimizing either L2 loss or angular difference loss. The third method works by first converting the continuous orientation estimation task into a set of discrete orientation estimation tasks and then converting the discrete orientation outputs back to the continuous orientation using a mean-shift algorithm. By evaluating on a vehicle orientation estimation task and a pedestrian orientation estimation task, we demonstrate that the discretization-based approach not only works better than the other two approaches but also achieves state-of-the-art performance. We also demonstrate that finding an appropriate feature representation is critical to achieve a good performance when adapting a DCNN trained for an image recognition task.
Attentional Network for Visual Object Detection
Feb 06, 2017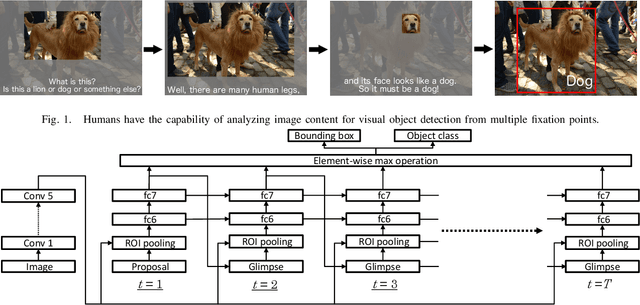
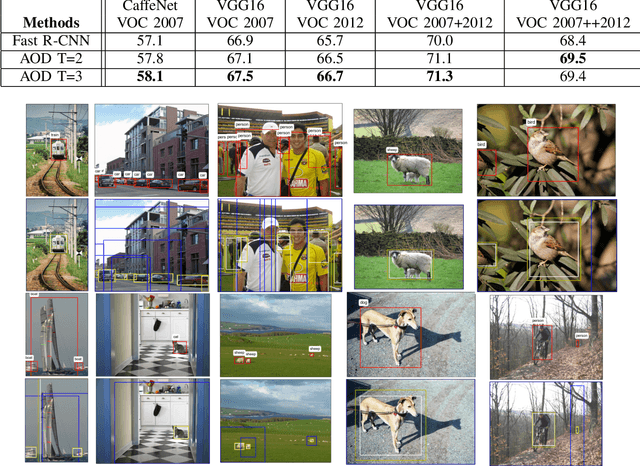
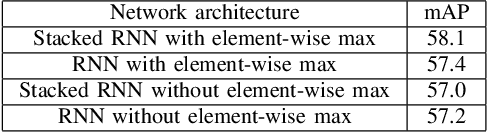
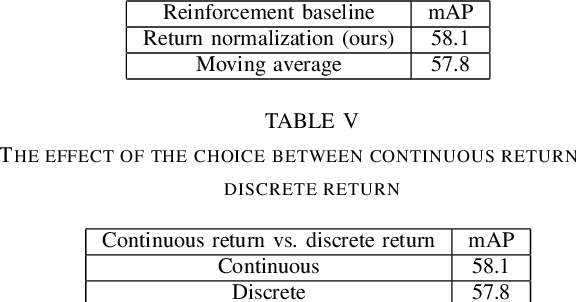
We propose augmenting deep neural networks with an attention mechanism for the visual object detection task. As perceiving a scene, humans have the capability of multiple fixation points, each attended to scene content at different locations and scales. However, such a mechanism is missing in the current state-of-the-art visual object detection methods. Inspired by the human vision system, we propose a novel deep network architecture that imitates this attention mechanism. As detecting objects in an image, the network adaptively places a sequence of glimpses of different shapes at different locations in the image. Evidences of the presence of an object and its location are extracted from these glimpses, which are then fused for estimating the object class and bounding box coordinates. Due to lacks of ground truth annotations of the visual attention mechanism, we train our network using a reinforcement learning algorithm with policy gradients. Experiment results on standard object detection benchmarks show that the proposed network consistently outperforms the baseline networks that does not model the attention mechanism.
Fashion Apparel Detection: The Role of Deep Convolutional Neural Network and Pose-dependent Priors
Jan 24, 2016In this work, we propose and address a new computer vision task, which we call fashion item detection, where the aim is to detect various fashion items a person in the image is wearing or carrying. The types of fashion items we consider in this work include hat, glasses, bag, pants, shoes and so on. The detection of fashion items can be an important first step of various e-commerce applications for fashion industry. Our method is based on state-of-the-art object detection method pipeline which combines object proposal methods with a Deep Convolutional Neural Network. Since the locations of fashion items are in strong correlation with the locations of body joints positions, we incorporate contextual information from body poses in order to improve the detection performance. Through the experiments, we demonstrate the effectiveness of the proposed method.
Growing Regression Forests by Classification: Applications to Object Pose Estimation
Jul 15, 2014In this work, we propose a novel node splitting method for regression trees and incorporate it into the regression forest framework. Unlike traditional binary splitting, where the splitting rule is selected from a predefined set of binary splitting rules via trial-and-error, the proposed node splitting method first finds clusters of the training data which at least locally minimize the empirical loss without considering the input space. Then splitting rules which preserve the found clusters as much as possible are determined by casting the problem into a classification problem. Consequently, our new node splitting method enjoys more freedom in choosing the splitting rules, resulting in more efficient tree structures. In addition to the Euclidean target space, we present a variant which can naturally deal with a circular target space by the proper use of circular statistics. We apply the regression forest employing our node splitting to head pose estimation (Euclidean target space) and car direction estimation (circular target space) and demonstrate that the proposed method significantly outperforms state-of-the-art methods (38.5% and 22.5% error reduction respectively).