 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning Deep Convolutional Neural Networks for Continuous Object Orientation Estimation
Paper and Code
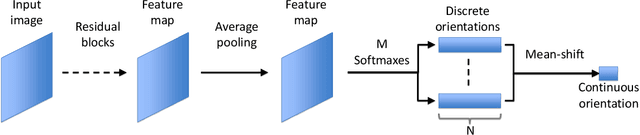

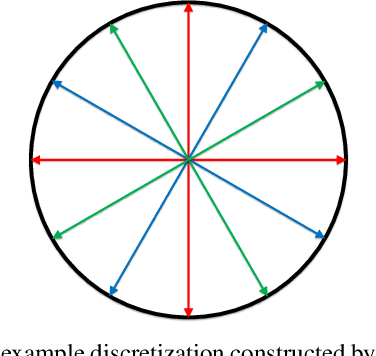

Deep Convolutional Neural Networks (DCNN) have been proven to be effective for various computer vision problems. In this work, we demonstrate its effectiveness on a continuous object orientation estimation task, which requires prediction of 0 to 360 degrees orientation of the objects. We do so by proposing and comparing three continuous orientation prediction approaches designed for the DCNNs. The first two approaches work by representing an orientation as a point on a unit circle and minimizing either L2 loss or angular difference loss. The third method works by first converting the continuous orientation estimation task into a set of discrete orientation estimation tasks and then converting the discrete orientation outputs back to the continuous orientation using a mean-shift algorithm. By evaluating on a vehicle orientation estimation task and a pedestrian orientation estimation task, we demonstrate that the discretization-based approach not only works better than the other two approaches but also achieves state-of-the-art performance. We also demonstrate that finding an appropriate feature representation is critical to achieve a good performance when adapting a DCNN trained for an image recognition task.