 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWoundAIssist: A Patient-Centered Mobile App for AI-Assisted Wound Care With Physicians in the Loop
Jun 06, 2025The rising prevalence of chronic wounds, especially in aging populations, presents a significant healthcare challenge due to prolonged hospitalizations, elevated costs, and reduced patient quality of life. Traditional wound care is resource-intensive, requiring frequent in-person visits that strain both patients and healthcare professionals (HCPs). Therefore, we present WoundAIssist, a patient-centered, AI-driven mobile application designed to support telemedical wound care. WoundAIssist enables patients to regularly document wounds at home via photographs and questionnaires, while physicians remain actively engaged in the care process through remote monitoring and video consultations. A distinguishing feature is an integrated lightweight deep learning model for on-device wound segmentation, which, combined with patient-reported data, enables continuous monitoring of wound healing progression. Developed through an iterative, user-centered process involving both patients and domain experts, WoundAIssist prioritizes an user-friendly design, particularly for elderly patients. A conclusive usability study with patients and dermatologists reported excellent usability, good app quality, and favorable perceptions of the AI-driven wound recognition. Our main contribution is two-fold: (I) the implementation and (II) evaluation of WoundAIssist, an easy-to-use yet comprehensive telehealth solution designed to bridge the gap between patients and HCPs. Additionally, we synthesize design insights for remote patient monitoring apps, derived from over three years of interdisciplinary research, that may inform the development of similar digital health tools across clinical domains.
Early Explorations of Lightweight Models for Wound Segmentation on Mobile Devices
Jul 11, 2024The aging population poses numerous challenges to healthcare, including the increase in chronic wounds in the elderly. The current approach to wound assessment by therapists based on photographic documentation is subjective, highlighting the need for computer-aided wound recognition from smartphone photos. This offers objective and convenient therapy monitoring, while being accessible to patients from their home at any time. However, despite research in mobile image segmentation, there is a lack of focus on mobile wound segmentation. To address this gap, we conduct initial research on three lightweight architectures to investigate their suitability for smartphone-based wound segmentation. Using public datasets and UNet as a baseline, our results are promising, with both ENet and TopFormer, as well as the larger UNeXt variant, showing comparable performance to UNet. Furthermore, we deploy the models into a smartphone app for visual assessment of live segmentation, where results demonstrate the effectiveness of TopFormer in distinguishing wounds from wound-coloured objects. While our study highlights the potential of transformer models for mobile wound segmentation, future work should aim to further improve the mask contours.
On the Choice of Data for Efficient Training and Validation of End-to-End Driving Models
Jun 01, 2022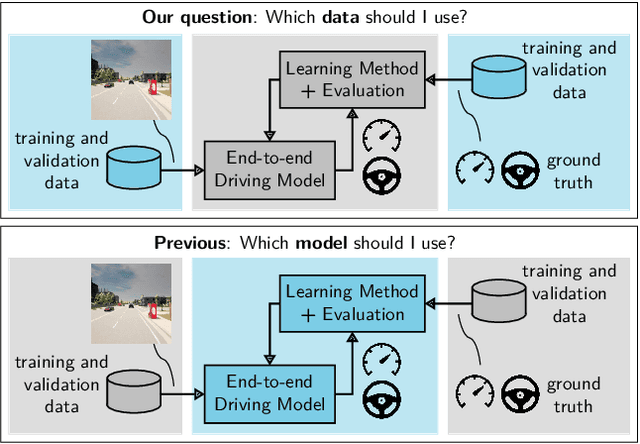
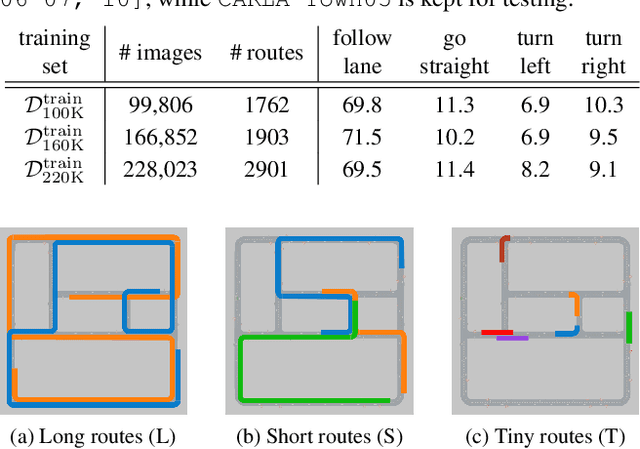
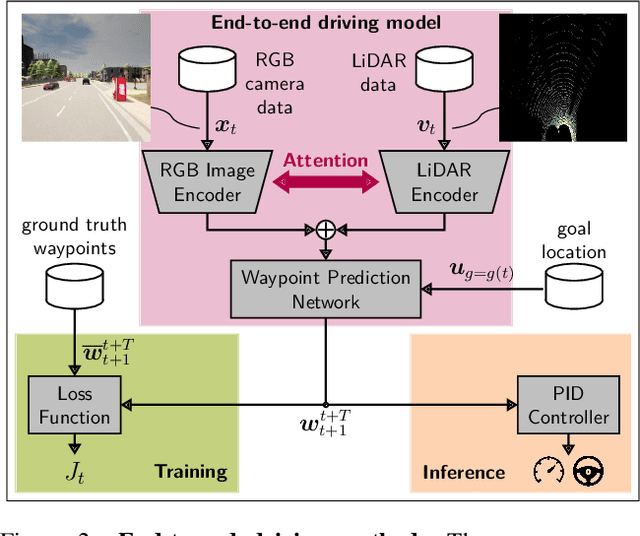
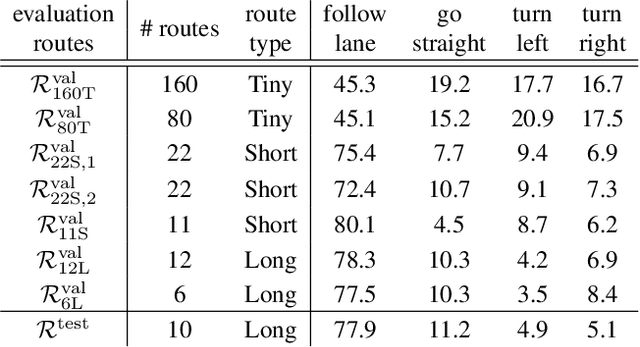
The emergence of data-driven machine learning (ML) has facilitated significant progress in many complicated tasks such as highly-automated driving. While much effort is put into improving the ML models and learning algorithms in such applications, little focus is put into how the training data and/or validation setting should be designed. In this paper we investigate the influence of several data design choices regarding training and validation of deep driving models trainable in an end-to-end fashion. Specifically, (i) we investigate how the amount of training data influences the final driving performance, and which performance limitations are induced through currently used mechanisms to generate training data. (ii) Further, we show by correlation analysis, which validation design enables the driving performance measured during validation to generalize well to unknown test environments. (iii) Finally, we investigate the effect of random seeding and non-determinism, giving insights which reported improvements can be deemed significant. Our evaluations using the popular CARLA simulator provide recommendations regarding data generation and driving route selection for an efficient future development of end-to-end driving models.