 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign Challenges of Multi-UAV Systems in Cyber-Physical Applications: A Comprehensive Survey, and Future Directions
Oct 23, 2018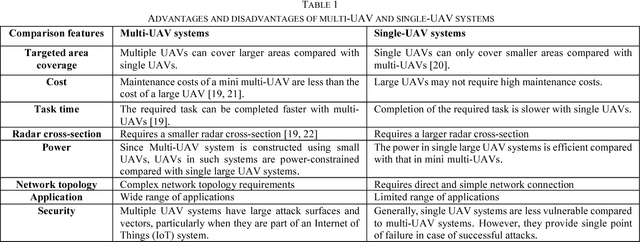
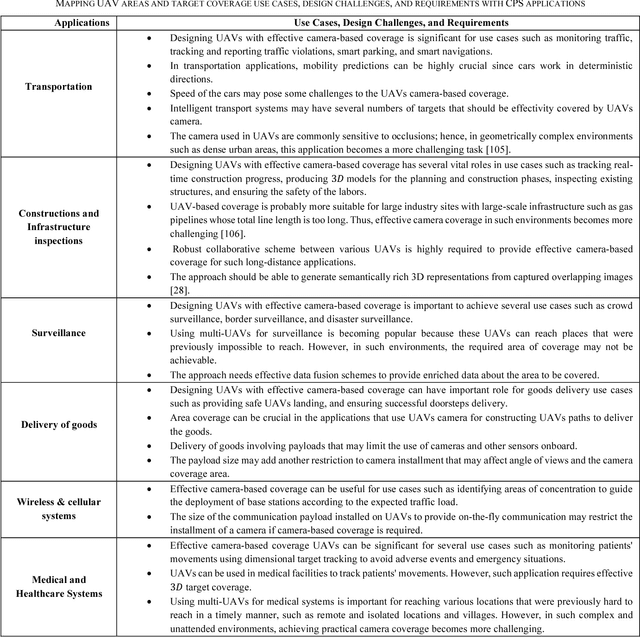
Unmanned Aerial Vehicles (UAVs) have recently rapidly grown to facilitate a wide range of innovative applications that can fundamentally change the way cyber-physical systems (CPSs) are designed. CPSs are a modern generation of systems with synergic cooperation between computational and physical potentials that can interact with humans through several new mechanisms. The main advantages of using UAVs in CPS application is their exceptional features, including their mobility, dynamism, effortless deployment, adaptive altitude, agility, adjustability, and effective appraisal of real-world functions anytime and anywhere. Furthermore, from the technology perspective, UAVs are predicted to be a vital element of the development of advanced CPSs. Therefore, in this survey, we aim to pinpoint the most fundamental and important design challenges of multi-UAV systems for CPS applications. We highlight key and versatile aspects that span the coverage and tracking of targets and infrastructure objects, energy-efficient navigation, and image analysis using machine learning for fine-grained CPS applications. Key prototypes and testbeds are also investigated to show how these practical technologies can facilitate CPS applications. We present and propose state-of-the-art algorithms to address design challenges with both quantitative and qualitative methods and map these challenges with important CPS applications to draw insightful conclusions on the challenges of each application. Finally, we summarize potential new directions and ideas that could shape future research in these areas.
On Realistic Target Coverage by Autonomous Drones
Sep 05, 2018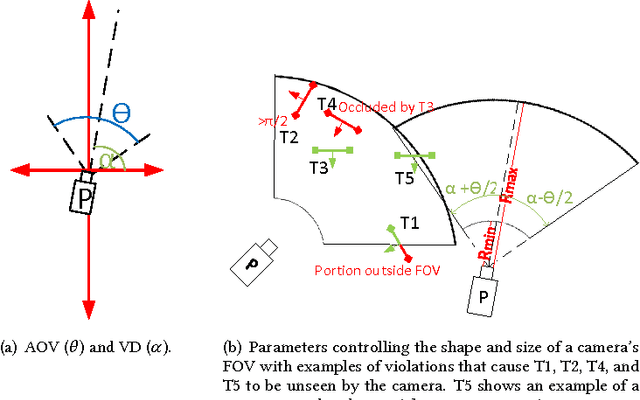
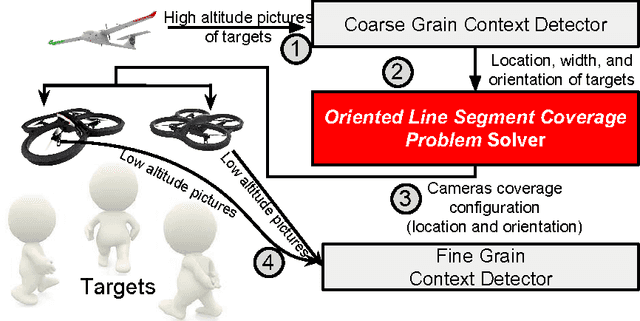
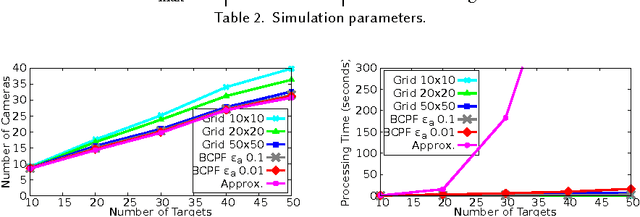
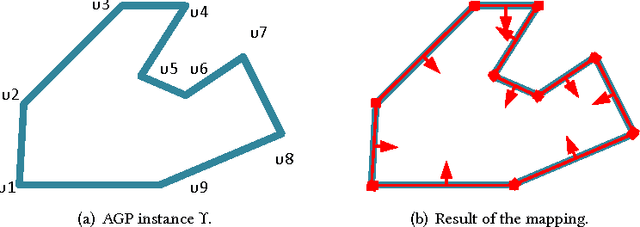
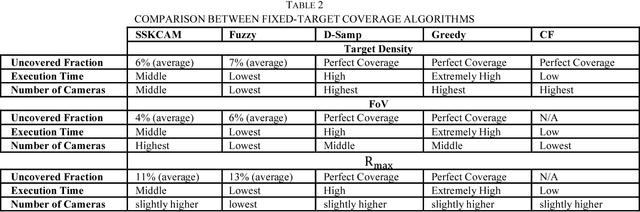
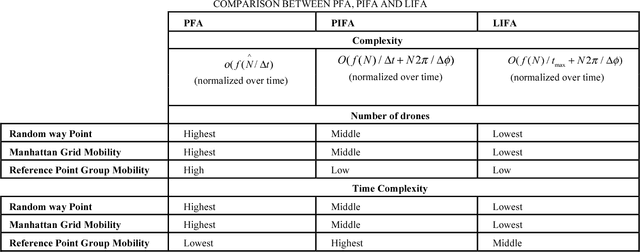
Low-cost mini-drones with advanced sensing and maneuverability enable a new class of intelligent sensing systems. To achieve the full potential of such drones, it is necessary to develop new enhanced formulations of both common and emerging sensing scenarios. Namely, several fundamental challenges in visual sensing remain unsolved including: 1) Fitting sizable targets in camera frames; 2) Effective viewpoints matching target poses; 3) Occlusion by elements in the environment, including other targets. In this paper, we introduce Argus: an autonomous system that utilizes drones to incrementally collect target information through a two-tier architecture. To tackle the stated challenges, Argus employs a novel geometric model that captures both target shapes and coverage constraints. Recognizing drones as the scarcest resource, Argus aims to minimize the number of drones required to cover a set of targets. We prove this problem is NP-hard, and even hard to approximate, before deriving a best-possible approximation algorithm along with a competitive sampling heuristic which runs up to 100x faster according to large-scale simulations. To test Argus in action, we demonstrate and analyze its performance on a prototype implementation. Finally, we present a number of extensions to accommodate more application requirements and highlight some open problems.