 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMining and Transferring Feature-Geometry Coherence for Unsupervised Point Cloud Registration
Nov 04, 2024



Point cloud registration, a fundamental task in 3D vision, has achieved remarkable success with learning-based methods in outdoor environments. Unsupervised outdoor point cloud registration methods have recently emerged to circumvent the need for costly pose annotations. However, they fail to establish reliable optimization objectives for unsupervised training, either relying on overly strong geometric assumptions, or suffering from poor-quality pseudo-labels due to inadequate integration of low-level geometric and high-level contextual information. We have observed that in the feature space, latent new inlier correspondences tend to cluster around respective positive anchors that summarize features of existing inliers. Motivated by this observation, we propose a novel unsupervised registration method termed INTEGER to incorporate high-level contextual information for reliable pseudo-label mining. Specifically, we propose the Feature-Geometry Coherence Mining module to dynamically adapt the teacher for each mini-batch of data during training and discover reliable pseudo-labels by considering both high-level feature representations and low-level geometric cues. Furthermore, we propose Anchor-Based Contrastive Learning to facilitate contrastive learning with anchors for a robust feature space. Lastly, we introduce a Mixed-Density Student to learn density-invariant features, addressing challenges related to density variation and low overlap in the outdoor scenario. Extensive experiments on KITTI and nuScenes datasets demonstrate that our INTEGER achieves competitive performance in terms of accuracy and generalizability.
SPEAL: Skeletal Prior Embedded Attention Learning for Cross-Source Point Cloud Registration
Dec 14, 2023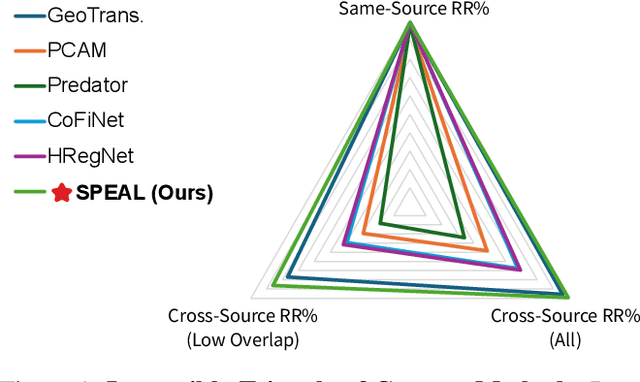
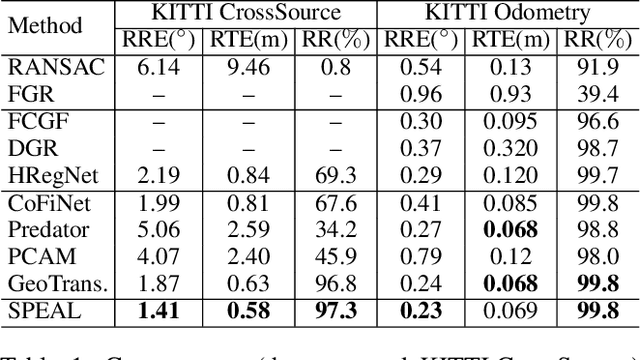
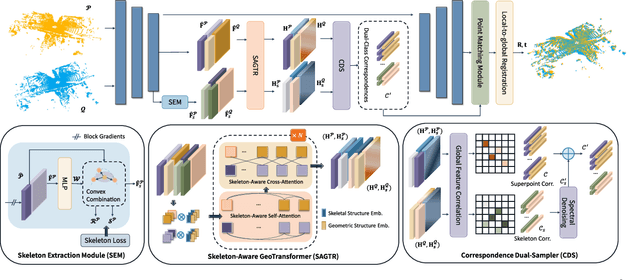
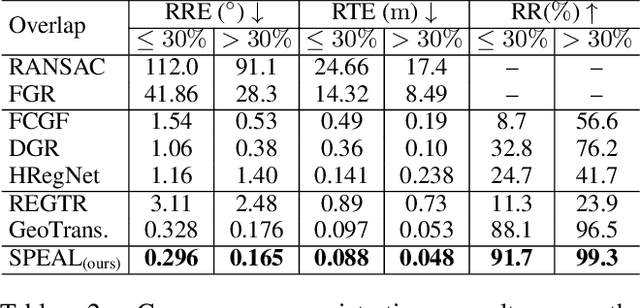
Point cloud registration, a fundamental task in 3D computer vision, has remained largely unexplored in cross-source point clouds and unstructured scenes. The primary challenges arise from noise, outliers, and variations in scale and density. However, neglected geometric natures of point clouds restricts the performance of current methods. In this paper, we propose a novel method termed SPEAL to leverage skeletal representations for effective learning of intrinsic topologies of point clouds, facilitating robust capture of geometric intricacy. Specifically, we design the Skeleton Extraction Module to extract skeleton points and skeletal features in an unsupervised manner, which is inherently robust to noise and density variances. Then, we propose the Skeleton-Aware GeoTransformer to encode high-level skeleton-aware features. It explicitly captures the topological natures and inter-point-cloud skeletal correlations with the noise-robust and density-invariant skeletal representations. Next, we introduce the Correspondence Dual-Sampler to facilitate correspondences by augmenting the correspondence set with skeletal correspondences. Furthermore, we construct a challenging novel large-scale cross-source point cloud dataset named KITTI CrossSource for benchmarking cross-source point cloud registration methods. Extensive quantitative and qualitative experiments are conducted to demonstrate our approach's superiority and robustness on both cross-source and same-source datasets. To the best of our knowledge, our approach is the first to facilitate point cloud registration with skeletal geometric priors.