 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGenAI-Bench: Evaluating and Improving Compositional Text-to-Visual Generation
Jun 19, 2024

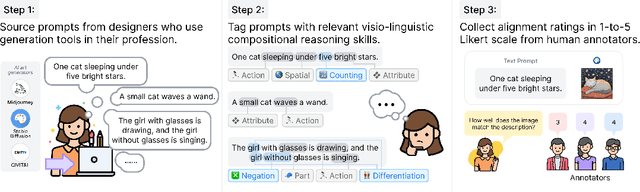

While text-to-visual models now produce photo-realistic images and videos, they struggle with compositional text prompts involving attributes, relationships, and higher-order reasoning such as logic and comparison. In this work, we conduct an extensive human study on GenAI-Bench to evaluate the performance of leading image and video generation models in various aspects of compositional text-to-visual generation. We also compare automated evaluation metrics against our collected human ratings and find that VQAScore -- a metric measuring the likelihood that a VQA model views an image as accurately depicting the prompt -- significantly outperforms previous metrics such as CLIPScore. In addition, VQAScore can improve generation in a black-box manner (without finetuning) via simply ranking a few (3 to 9) candidate images. Ranking by VQAScore is 2x to 3x more effective than other scoring methods like PickScore, HPSv2, and ImageReward at improving human alignment ratings for DALL-E 3 and Stable Diffusion, especially on compositional prompts that require advanced visio-linguistic reasoning. We will release a new GenAI-Rank benchmark with over 40,000 human ratings to evaluate scoring metrics on ranking images generated from the same prompt. Lastly, we discuss promising areas for improvement in VQAScore, such as addressing fine-grained visual details. We will release all human ratings (over 80,000) to facilitate scientific benchmarking of both generative models and automated metrics.
I-PHYRE: Interactive Physical Reasoning
Dec 04, 2023



Current evaluation protocols predominantly assess physical reasoning in stationary scenes, creating a gap in evaluating agents' abilities to interact with dynamic events. While contemporary methods allow agents to modify initial scene configurations and observe consequences, they lack the capability to interact with events in real time. To address this, we introduce I-PHYRE, a framework that challenges agents to simultaneously exhibit intuitive physical reasoning, multi-step planning, and in-situ intervention. Here, intuitive physical reasoning refers to a quick, approximate understanding of physics to address complex problems; multi-step denotes the need for extensive sequence planning in I-PHYRE, considering each intervention can significantly alter subsequent choices; and in-situ implies the necessity for timely object manipulation within a scene, where minor timing deviations can result in task failure. We formulate four game splits to scrutinize agents' learning and generalization of essential principles of interactive physical reasoning, fostering learning through interaction with representative scenarios. Our exploration involves three planning strategies and examines several supervised and reinforcement agents' zero-shot generalization proficiency on I-PHYRE. The outcomes highlight a notable gap between existing learning algorithms and human performance, emphasizing the imperative for more research in enhancing agents with interactive physical reasoning capabilities. The environment and baselines will be made publicly available.
On the Learning Mechanisms in Physical Reasoning
Oct 05, 2022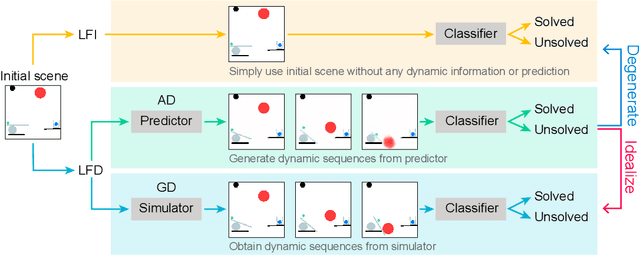

Is dynamics prediction indispensable for physical reasoning? If so, what kind of roles do the dynamics prediction modules play during the physical reasoning process? Most studies focus on designing dynamics prediction networks and treating physical reasoning as a downstream task without investigating the questions above, taking for granted that the designed dynamics prediction would undoubtedly help the reasoning process. In this work, we take a closer look at this assumption, exploring this fundamental hypothesis by comparing two learning mechanisms: Learning from Dynamics (LfD) and Learning from Intuition (LfI). In the first experiment, we directly examine and compare these two mechanisms. Results show a surprising finding: Simple LfI is better than or on par with state-of-the-art LfD. This observation leads to the second experiment with Ground-truth Dynamics, the ideal case of LfD wherein dynamics are obtained directly from a simulator. Results show that dynamics, if directly given instead of approximated, would achieve much higher performance than LfI alone on physical reasoning; this essentially serves as the performance upper bound. Yet practically, LfD mechanism can only predict Approximate Dynamics using dynamics learning modules that mimic the physical laws, making the following downstream physical reasoning modules degenerate into the LfI paradigm; see the third experiment. We note that this issue is hard to mitigate, as dynamics prediction errors inevitably accumulate in the long horizon. Finally, in the fourth experiment, we note that LfI, the extremely simpler strategy when done right, is more effective in learning to solve physical reasoning problems. Taken together, the results on the challenging benchmark of PHYRE show that LfI is, if not better, as good as LfD for dynamics prediction. However, the potential improvement from LfD, though challenging, remains lucrative.