 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHaptic-ACT: Bridging Human Intuition with Compliant Robotic Manipulation via Immersive VR
Sep 18, 2024



Robotic manipulation is essential for the widespread adoption of robots in industrial and home settings and has long been a focus within the robotics community. Advances in artificial intelligence have introduced promising learning-based methods to address this challenge, with imitation learning emerging as particularly effective. However, efficiently acquiring high-quality demonstrations remains a challenge. In this work, we introduce an immersive VR-based teleoperation setup designed to collect demonstrations from a remote human user. We also propose an imitation learning framework called Haptic Action Chunking with Transformers (Haptic-ACT). To evaluate the platform, we conducted a pick-and-place task and collected 50 demonstration episodes. Results indicate that the immersive VR platform significantly reduces demonstrator fingertip forces compared to systems without haptic feedback, enabling more delicate manipulation. Additionally, evaluations of the Haptic-ACT framework in both the MuJoCo simulator and on a real robot demonstrate its effectiveness in teaching robots more compliant manipulation compared to the original ACT. Additional materials are available at https://sites.google.com/view/hapticact.
Immersive Demonstrations are the Key to Imitation Learning
Jan 22, 2023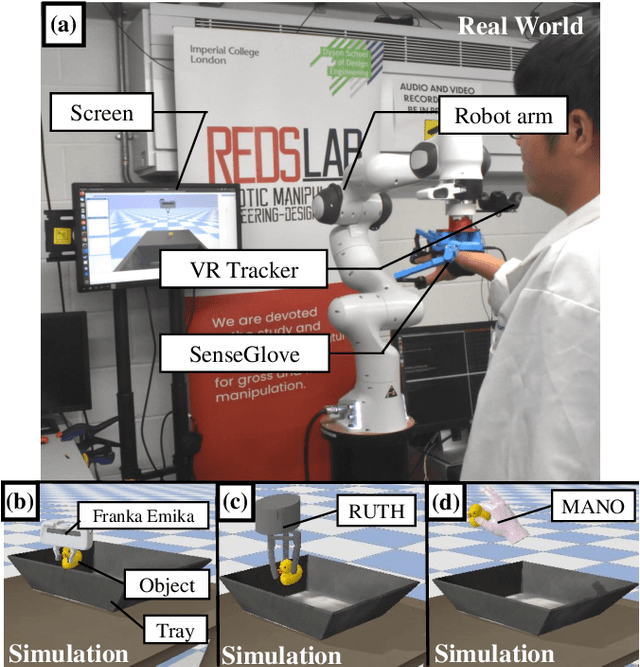
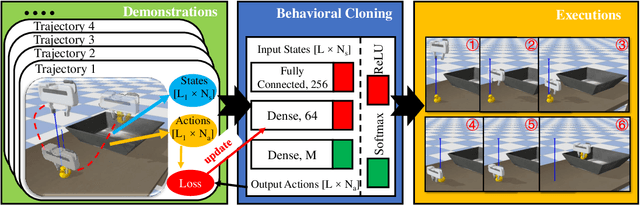
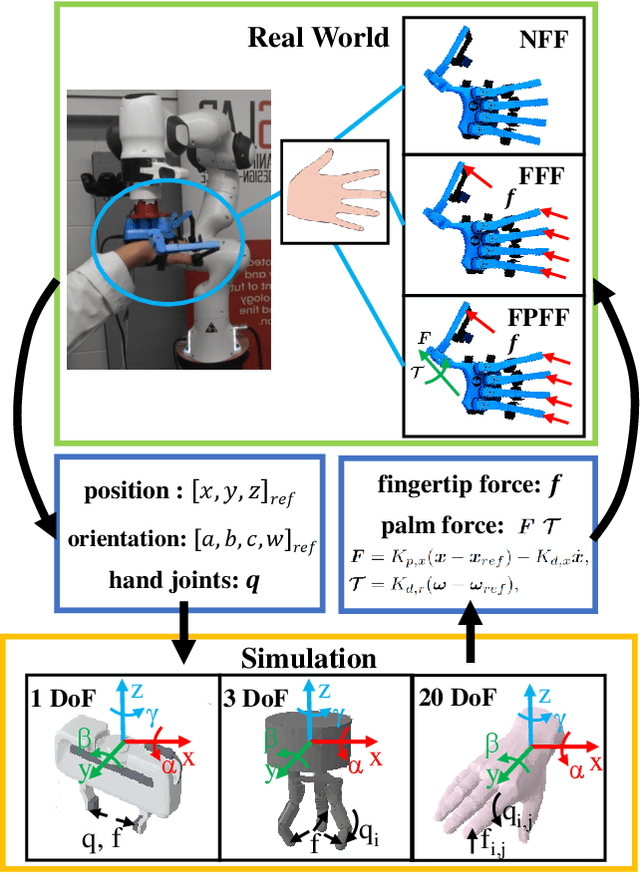
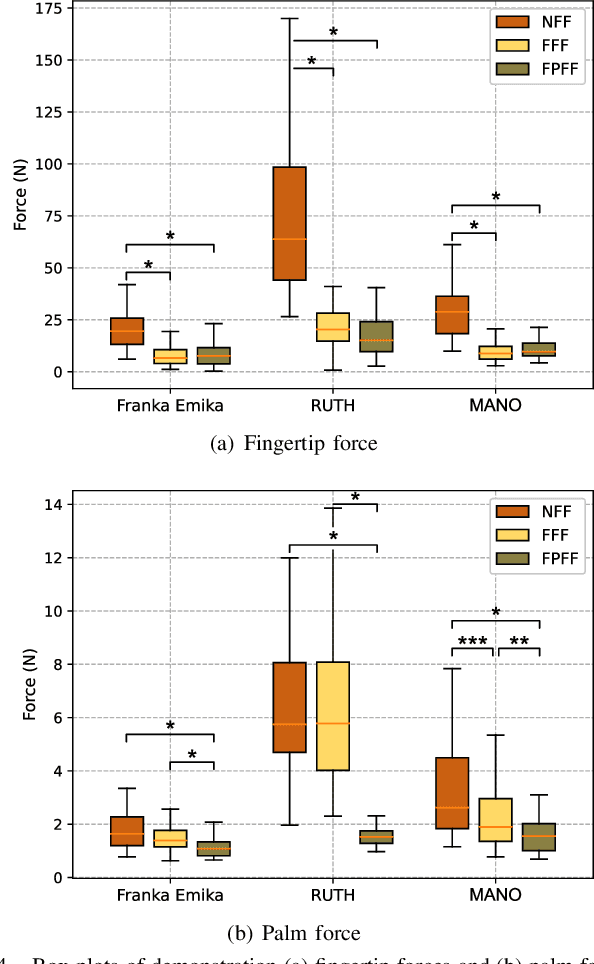
Achieving successful robotic manipulation is an essential step towards robots being widely used in industry and home settings. Recently, many learning-based methods have been proposed to tackle this challenge, with imitation learning showing great promise. However, imperfect demonstrations and a lack of feedback from teleoperation systems may lead to poor or even unsafe results. In this work we explore the effect of demonstrator force feedback on imitation learning, using a feedback glove and a robot arm to render fingertip-level and palm-level forces, respectively. 10 participants recorded 5 demonstrations of a pick-and-place task with 3 grippers, under conditions with no force feedback, fingertip force feedback, and fingertip and palm force feedback. Results show that force feedback significantly reduces demonstrator fingertip and palm forces, leads to a lower variation in demonstrator forces, and recorded trajectories that a quicker to execute. Using behavioral cloning, we find that agents trained to imitate these trajectories mirror these benefits, even though agents have no force data shown to them during training. We conclude that immersive demonstrations, achieved with force feedback, may be the key to unlocking safer, quicker to execute dexterous manipulation policies.
EfficientGrasp: A Unified Data-Efficient Learning to Grasp Method for Multi-fingered Robot Hands
Jun 30, 2022


Autonomous grasping of novel objects that are previously unseen to a robot is an ongoing challenge in robotic manipulation. In the last decades, many approaches have been presented to address this problem for specific robot hands. The UniGrasp framework, introduced recently, has the ability to generalize to different types of robotic grippers; however, this method does not work on grippers with closed-loop constraints and is data-inefficient when applied to robot hands with multigrasp configurations. In this paper, we present EfficientGrasp, a generalized grasp synthesis and gripper control method that is independent of gripper model specifications. EfficientGrasp utilizes a gripper workspace feature rather than UniGrasp's gripper attribute inputs. This reduces memory use by 81.7% during training and makes it possible to generalize to more types of grippers, such as grippers with closed-loop constraints. The effectiveness of EfficientGrasp is evaluated by conducting object grasping experiments both in simulation and real-world; results show that the proposed method also outperforms UniGrasp when considering only grippers without closed-loop constraints. In these cases, EfficientGrasp shows 9.85% higher accuracy in generating contact points and 3.10% higher grasping success rate in simulation. The real-world experiments are conducted with a gripper with closed-loop constraints, which UniGrasp fails to handle while EfficientGrasp achieves a success rate of 83.3%. The main causes of grasping failures of the proposed method are analyzed, highlighting ways of enhancing grasp performance.