 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLLM-Based Behavior Tree Generation for Construction Machinery
Feb 01, 2026Earthwork operations are facing an increasing demand, while workforce aging and skill loss create a pressing need for automation. ROS2-TMS for Construction, a Cyber-Physical System framework designed to coordinate construction machinery, has been proposed for autonomous operation; however, its reliance on manually designed Behavior Trees (BTs) limits scalability, particularly in scenarios involving heterogeneous machine cooperation. Recent advances in large language models (LLMs) offer new opportunities for task planning and BT generation. However, most existing approaches remain confined to simulations or simple manipulators, with relatively few applications demonstrated in real-world contexts, such as complex construction sites involving multiple machines. This paper proposes an LLM-based workflow for BT generation, introducing synchronization flags to enable safe and cooperative operation. The workflow consists of two steps: high-level planning, where the LLM generates synchronization flags, and BT generation using structured templates. Safety is ensured by planning with parameters stored in the system database. The proposed method is validated in simulation and further demonstrated through real-world experiments, highlighting its potential to advance automation in civil engineering.
Development of CPS Platform for Autonomous Construction
Nov 29, 2024



In recent years, labor shortages due to the declining birthrate and aging population have become significant challenges at construction sites in developed countries, including Japan. To address these challenges, we are developing an open platform called ROS2-TMS for Construction, a Cyber-Physical System (CPS) for construction sites, to achieve both efficiency and safety in earthwork operations. In ROS2-TMS for Construction, the system comprehensively collects and stores environmental information from sensors placed throughout the construction site. Based on these data, a real-time virtual construction site is created in cyberspace. Then, based on the state of construction machinery and environmental conditions in cyberspace, the optimal next actions for actual construction machinery are determined, and the construction machinery is operated accordingly. In this project, we decided to use the Open Platform for Earthwork with Robotics and Autonomy (OPERA), developed by the Public Works Research Institute (PWRI) in Japan, to control construction machinery from ROS2-TMS for Construction with an originally extended behavior tree. In this study, we present an overview of OPERA, focusing on the newly developed navigation package for operating the crawler dump, as well as the overall structure of ROS2-TMS for Construction as a Cyber-Physical System (CPS). Additionally, we conducted experiments using a crawler dump and a backhoe to verify the aforementioned functionalities.
DART-LLM: Dependency-Aware Multi-Robot Task Decomposition and Execution using Large Language Models
Nov 13, 2024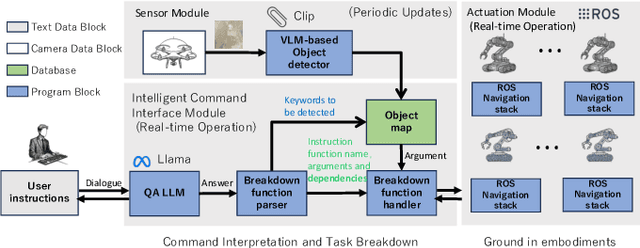
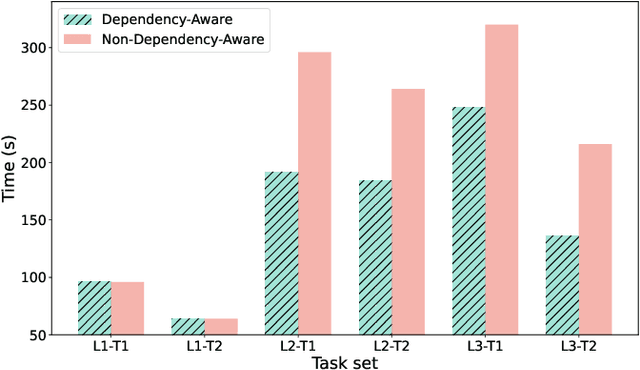
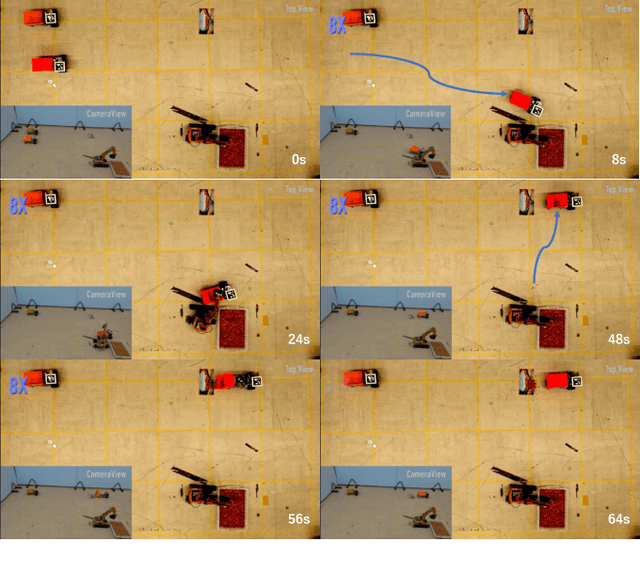
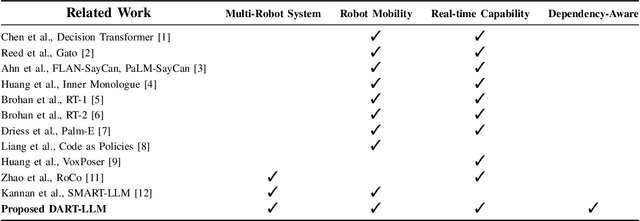
Large Language Models (LLMs) have demonstrated significant reasoning capabilities in robotic systems. However, their deployment in multi-robot systems remains fragmented and struggles to handle complex task dependencies and parallel execution. This study introduces the DART-LLM (Dependency-Aware Multi-Robot Task Decomposition and Execution using Large Language Models) system, designed to address these challenges. DART-LLM utilizes LLMs to parse natural language instructions, decomposing them into multiple subtasks with dependencies to establish complex task sequences, thereby enhancing efficient coordination and parallel execution in multi-robot systems. The system includes the QA LLM module, Breakdown Function modules, Actuation module, and a Vision-Language Model (VLM)-based object detection module, enabling task decomposition and execution from natural language instructions to robotic actions. Experimental results demonstrate that DART-LLM excels in handling long-horizon tasks and collaborative tasks with complex dependencies. Even when using smaller models like Llama 3.1 8B, the system achieves good performance, highlighting DART-LLM's robustness in terms of model size. Please refer to the project website \url{https://wyd0817.github.io/project-dart-llm/} for videos and code.
Estimation of articulated angle in six-wheeled dump trucks using multiple GNSS receivers for autonomous driving
Dec 05, 2023Due to the declining birthrate and aging population, the shortage of labor in the construction industry has become a serious problem, and increasing attention has been paid to automation of construction equipment. We focus on the automatic operation of articulated six-wheel dump trucks at construction sites. For the automatic operation of the dump trucks, it is important to estimate the position and the articulated angle of the dump trucks with high accuracy. In this study, we propose a method for estimating the state of a dump truck by using four global navigation satellite systems (GNSSs) installed on an articulated dump truck and a graph optimization method that utilizes the redundancy of multiple GNSSs. By adding real-time kinematic (RTK)-GNSS constraints and geometric constraints between the four antennas, the proposed method can robustly estimate the position and articulation angle even in environments where GNSS satellites are partially blocked. As a result of evaluating the accuracy of the proposed method through field tests, it was confirmed that the articulated angle could be estimated with an accuracy of 0.1$^\circ$ in an open-sky environment and 0.7$^\circ$ in a mountainous area simulating an elevation angle of 45$^\circ$ where GNSS satellites are blocked.
* This is an electronic version of an article published in ADVANCED ROBOTICS, 35:23, 1376-1387, 2021. ADVANCED ROBOTICS is available online at: www.tandfonline.com/Article DOI; 10.1080/01691864.2019.1619622