 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMRS-CWC: A Weakly Constrained Multi-Robot System with Controllable Constraint Stiffness for Mobility and Navigation in Unknown 3D Rough Environments
Mar 14, 2025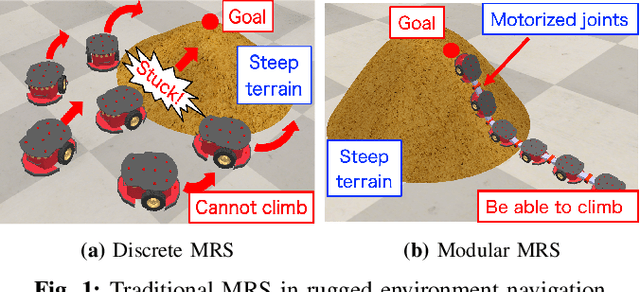
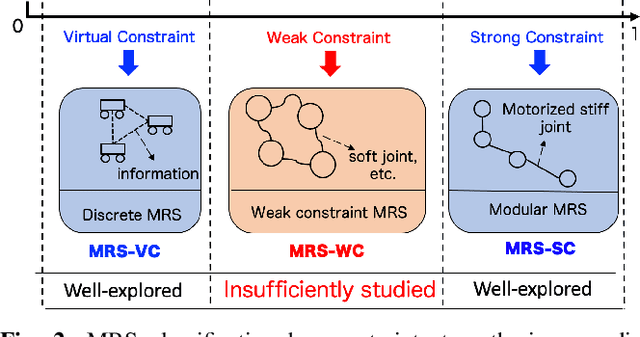
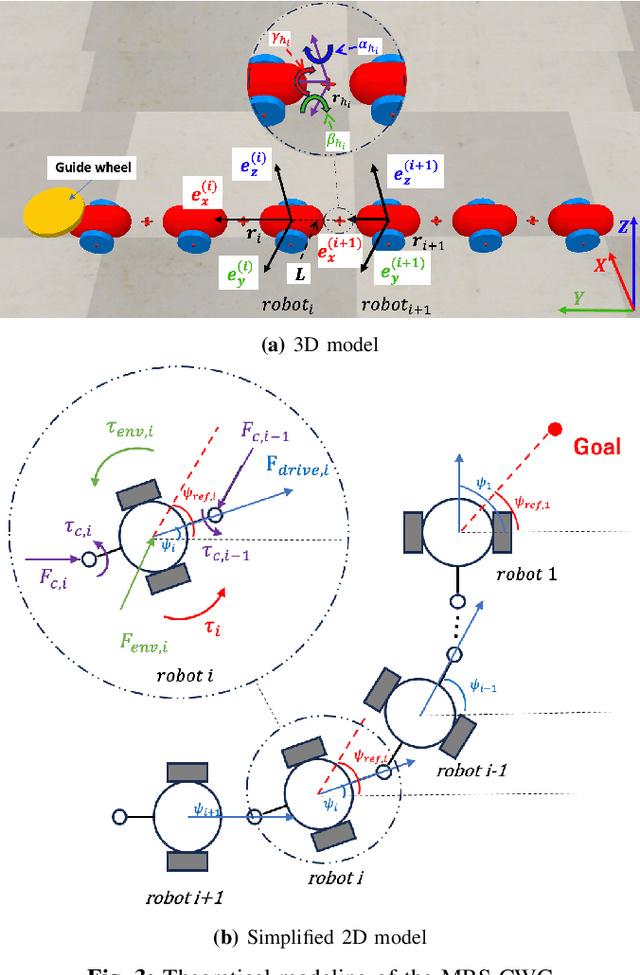
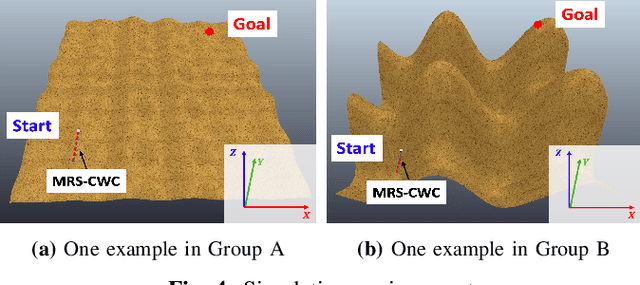
Navigating unknown three-dimensional (3D) rugged environments is challenging for multi-robot systems. Traditional discrete systems struggle with rough terrain due to limited individual mobility, while modular systems--where rigid, controllable constraints link robot units--improve traversal but suffer from high control complexity and reduced flexibility. To address these limitations, we propose the Multi-Robot System with Controllable Weak Constraints (MRS-CWC), where robot units are connected by constraints with dynamically adjustable stiffness. This adaptive mechanism softens or stiffens in real-time during environmental interactions, ensuring a balance between flexibility and mobility. We formulate the system's dynamics and control model and evaluate MRS-CWC against six baseline methods and an ablation variant in a benchmark dataset with 100 different simulation terrains. Results show that MRS-CWC achieves the highest navigation completion rate and ranks second in success rate, efficiency, and energy cost in the highly rugged terrain group, outperforming all baseline methods without relying on environmental modeling, path planning, or complex control. Even where MRS-CWC ranks second, its performance is only slightly behind a more complex ablation variant with environmental modeling and path planning. Finally, we develop a physical prototype and validate its feasibility in a constructed rugged environment. For videos, simulation benchmarks, and code, please visit https://wyd0817.github.io/project-mrs-cwc/.
DART-LLM: Dependency-Aware Multi-Robot Task Decomposition and Execution using Large Language Models
Nov 13, 2024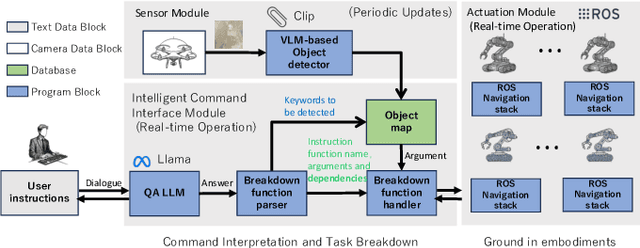
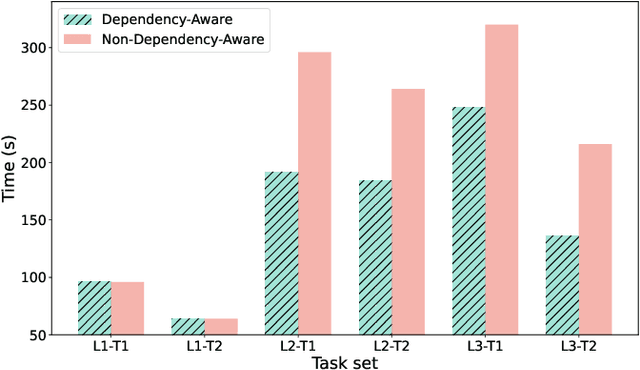
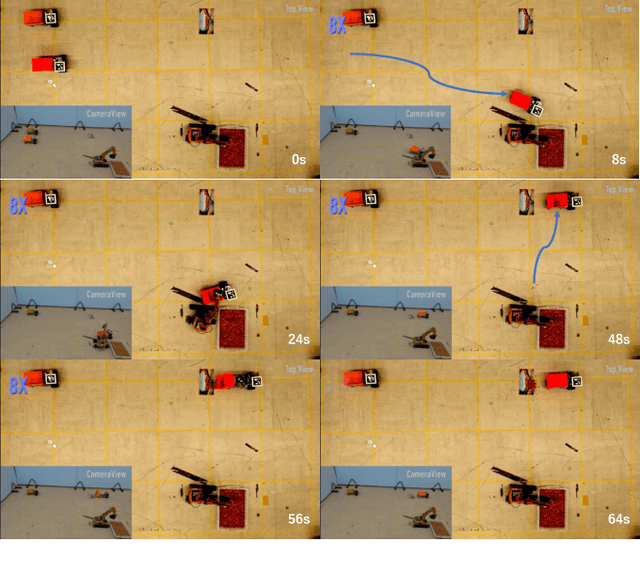
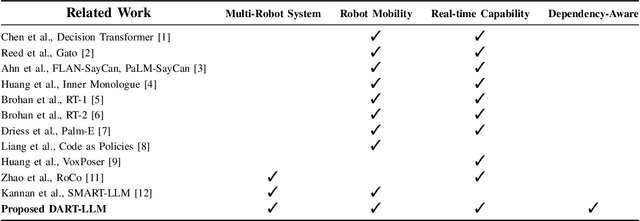
Large Language Models (LLMs) have demonstrated significant reasoning capabilities in robotic systems. However, their deployment in multi-robot systems remains fragmented and struggles to handle complex task dependencies and parallel execution. This study introduces the DART-LLM (Dependency-Aware Multi-Robot Task Decomposition and Execution using Large Language Models) system, designed to address these challenges. DART-LLM utilizes LLMs to parse natural language instructions, decomposing them into multiple subtasks with dependencies to establish complex task sequences, thereby enhancing efficient coordination and parallel execution in multi-robot systems. The system includes the QA LLM module, Breakdown Function modules, Actuation module, and a Vision-Language Model (VLM)-based object detection module, enabling task decomposition and execution from natural language instructions to robotic actions. Experimental results demonstrate that DART-LLM excels in handling long-horizon tasks and collaborative tasks with complex dependencies. Even when using smaller models like Llama 3.1 8B, the system achieves good performance, highlighting DART-LLM's robustness in terms of model size. Please refer to the project website \url{https://wyd0817.github.io/project-dart-llm/} for videos and code.
Power in Numbers: Primitive Algorithm for Swarm Robot Navigation in Unknown Environments
Oct 17, 2024Recently, the navigation of mobile robots in unknown environments has become a particularly significant research topic. Previous studies have primarily employed real-time environmental mapping using cameras and LiDAR, along with self-localization and path generation based on those maps. Additionally, there is research on Sim-to-Real transfer, where robots acquire behaviors through pre-trained reinforcement learning and apply these learned actions in real-world navigation. However, strictly the observe action and modelling of unknown environments that change unpredictably over time with accuracy and precision is an extremely complex endeavor. This study proposes a simple navigation algorithm for traversing unknown environments by utilizes the number of swarm robots. The proposed algorithm assumes that the robot has only the simple function of sensing the direction of the goal and the relative positions of the surrounding robots. The robots can navigate an unknown environment by simply continuing towards the goal while bypassing surrounding robots. The method does not need to sense the environment, determine whether they or other robots are stuck, or do the complicated inter-robot communication. We mathematically validate the proposed navigation algorithm, present numerical simulations based on the potential field method, and conduct experimental demonstrations using developed robots based on the sound fields for navigation.