 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMRS-CWC: A Weakly Constrained Multi-Robot System with Controllable Constraint Stiffness for Mobility and Navigation in Unknown 3D Rough Environments
Mar 14, 2025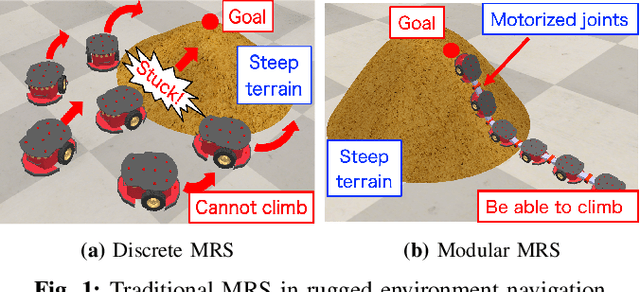
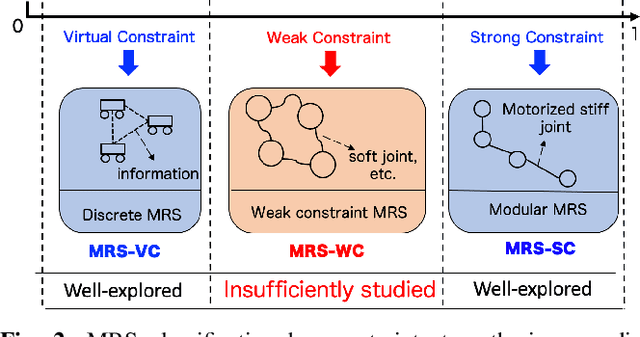
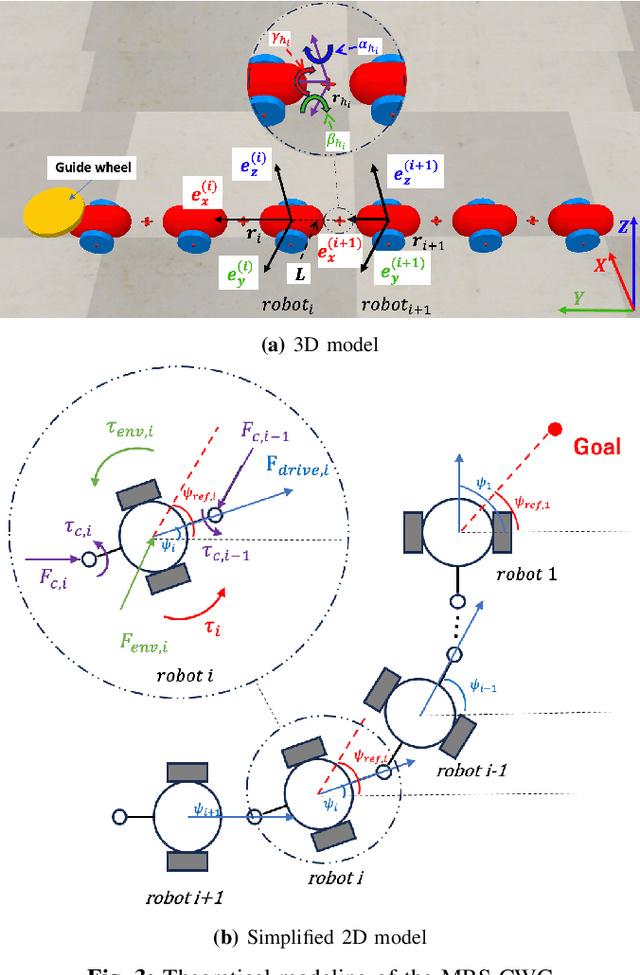
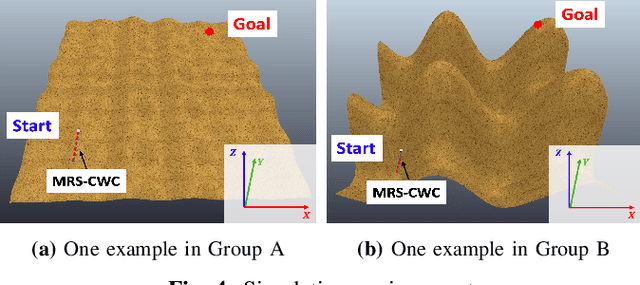
Navigating unknown three-dimensional (3D) rugged environments is challenging for multi-robot systems. Traditional discrete systems struggle with rough terrain due to limited individual mobility, while modular systems--where rigid, controllable constraints link robot units--improve traversal but suffer from high control complexity and reduced flexibility. To address these limitations, we propose the Multi-Robot System with Controllable Weak Constraints (MRS-CWC), where robot units are connected by constraints with dynamically adjustable stiffness. This adaptive mechanism softens or stiffens in real-time during environmental interactions, ensuring a balance between flexibility and mobility. We formulate the system's dynamics and control model and evaluate MRS-CWC against six baseline methods and an ablation variant in a benchmark dataset with 100 different simulation terrains. Results show that MRS-CWC achieves the highest navigation completion rate and ranks second in success rate, efficiency, and energy cost in the highly rugged terrain group, outperforming all baseline methods without relying on environmental modeling, path planning, or complex control. Even where MRS-CWC ranks second, its performance is only slightly behind a more complex ablation variant with environmental modeling and path planning. Finally, we develop a physical prototype and validate its feasibility in a constructed rugged environment. For videos, simulation benchmarks, and code, please visit https://wyd0817.github.io/project-mrs-cwc/.
Power in Numbers: Primitive Algorithm for Swarm Robot Navigation in Unknown Environments
Oct 17, 2024Recently, the navigation of mobile robots in unknown environments has become a particularly significant research topic. Previous studies have primarily employed real-time environmental mapping using cameras and LiDAR, along with self-localization and path generation based on those maps. Additionally, there is research on Sim-to-Real transfer, where robots acquire behaviors through pre-trained reinforcement learning and apply these learned actions in real-world navigation. However, strictly the observe action and modelling of unknown environments that change unpredictably over time with accuracy and precision is an extremely complex endeavor. This study proposes a simple navigation algorithm for traversing unknown environments by utilizes the number of swarm robots. The proposed algorithm assumes that the robot has only the simple function of sensing the direction of the goal and the relative positions of the surrounding robots. The robots can navigate an unknown environment by simply continuing towards the goal while bypassing surrounding robots. The method does not need to sense the environment, determine whether they or other robots are stuck, or do the complicated inter-robot communication. We mathematically validate the proposed navigation algorithm, present numerical simulations based on the potential field method, and conduct experimental demonstrations using developed robots based on the sound fields for navigation.
GREEMA: Proposal and Experimental Verification of Growing Robot by Eating Environmental MAterial for Landslide Disaster
Nov 02, 2023In areas that are inaccessible to humans, such as the lunar surface and landslide sites, there is a need for multiple autonomous mobile robot systems that can replace human workers. In particular, at landslide sites such as river channel blockages, robots are required to remove water and sediment from the site as soon as possible. Conventionally, several construction machines have been deployed to the site for civil engineering work. However, because of the large size and weight of conventional construction equipment, it is difficult to move multiple units of construction equipment to the site, resulting in significant transportation costs and time. To solve such problems, this study proposes a novel growing robot by eating environmental material called GREEMA, which is lightweight and compact during transportation, but can function by eating on environmental materials once it arrives at the site. GREEMA actively takes in environmental materials such as water and sediment, uses them as its structure, and removes them by moving itself. In this paper, we developed and experimentally verified two types of GREEMAs. First, we developed a fin-type swimming robot that passively takes water into its body using a water-absorbing polymer and forms a body to express its swimming function. Second, we constructed an arm-type robot that eats soil to increase the rigidity of its body. We discuss the results of these two experiments from the viewpoint of Explicit-Implicit control and describe the design theory of GREEMA.
Route Design in Sheepdog System--Traveling Salesman Problem Formulation and Evolutionary Computation Solution--
Oct 04, 2023In this study, we consider the guidance control problem of the sheepdog system, which involves the guidance of the flock using the characteristics of the sheepdog and sheep. Sheepdog systems require a strategy to guide sheep agents to a target value using a small number of sheepdog agents, and various methods have been proposed. Previous studies have proposed a guidance control law to guide a herd of sheep reliably, but the movement distance of a sheepdog required for guidance has not been considered. Therefore, in this study, we propose a novel guidance algorithm in which a supposedly efficient route for guiding a flock of sheep is designed via Traveling Salesman Problem and evolutionary computation. Numerical simulations were performed to confirm whether sheep flocks could be guided and controlled using the obtained guidance routes. We specifically revealed that the proposed method reduces both the guidance failure rate and the guidance distance.