 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLabellessFace: Fair Metric Learning for Face Recognition without Attribute Labels
Sep 14, 2024


Demographic bias is one of the major challenges for face recognition systems. The majority of existing studies on demographic biases are heavily dependent on specific demographic groups or demographic classifier, making it difficult to address performance for unrecognised groups. This paper introduces ``LabellessFace'', a novel framework that improves demographic bias in face recognition without requiring demographic group labeling typically required for fairness considerations. We propose a novel fairness enhancement metric called the class favoritism level, which assesses the extent of favoritism towards specific classes across the dataset. Leveraging this metric, we introduce the fair class margin penalty, an extension of existing margin-based metric learning. This method dynamically adjusts learning parameters based on class favoritism levels, promoting fairness across all attributes. By treating each class as an individual in facial recognition systems, we facilitate learning that minimizes biases in authentication accuracy among individuals. Comprehensive experiments have demonstrated that our proposed method is effective for enhancing fairness while maintaining authentication accuracy.
GREEMA: Proposal and Experimental Verification of Growing Robot by Eating Environmental MAterial for Landslide Disaster
Nov 02, 2023In areas that are inaccessible to humans, such as the lunar surface and landslide sites, there is a need for multiple autonomous mobile robot systems that can replace human workers. In particular, at landslide sites such as river channel blockages, robots are required to remove water and sediment from the site as soon as possible. Conventionally, several construction machines have been deployed to the site for civil engineering work. However, because of the large size and weight of conventional construction equipment, it is difficult to move multiple units of construction equipment to the site, resulting in significant transportation costs and time. To solve such problems, this study proposes a novel growing robot by eating environmental material called GREEMA, which is lightweight and compact during transportation, but can function by eating on environmental materials once it arrives at the site. GREEMA actively takes in environmental materials such as water and sediment, uses them as its structure, and removes them by moving itself. In this paper, we developed and experimentally verified two types of GREEMAs. First, we developed a fin-type swimming robot that passively takes water into its body using a water-absorbing polymer and forms a body to express its swimming function. Second, we constructed an arm-type robot that eats soil to increase the rigidity of its body. We discuss the results of these two experiments from the viewpoint of Explicit-Implicit control and describe the design theory of GREEMA.
Marine Snow Removal Benchmarking Dataset
Mar 29, 2021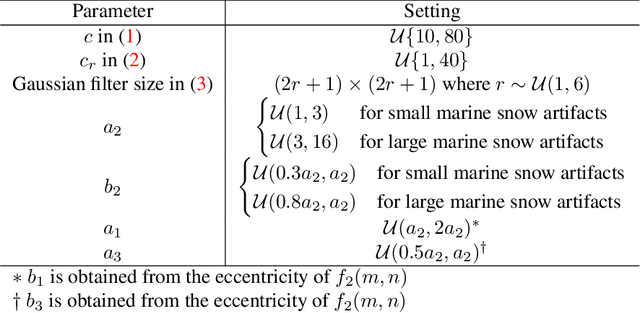
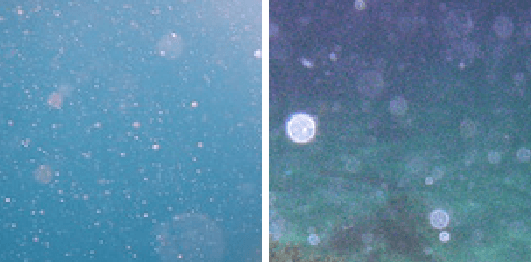
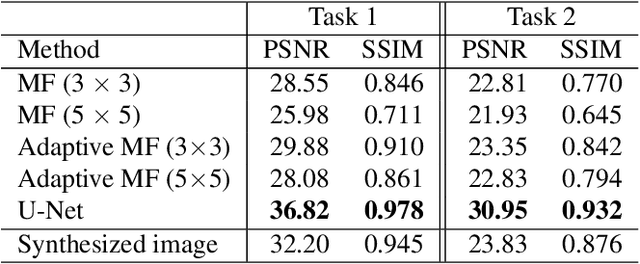
This paper introduces a new benchmarking dataset for marine snow removal of underwater images. Marine snow is one of the main degradation sources of underwater images that are caused by small particles, e.g., organic matter and sand, between the underwater scene and photosensors. We mathematically model two typical types of marine snow from the observations of real underwater images. The modeled artifacts are synthesized with underwater images to construct large-scale pairs of ground-truth and degraded images to calculate objective qualities for marine snow removal and to train a deep neural network. We propose two marine snow removal tasks using the dataset and show the first benchmarking results of marine snow removal. The Marine Snow Removal Benchmarking Dataset is publicly available online.