 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Psychology of GPT-4: Moderately anxious, slightly masculine, honest, and humble
Feb 01, 2024We subject GPT-4 to a number of rigorous psychometric tests and analyze the results. We find that, compared to the average human, GPT-4 tends to show more honesty and humility, and less machiavellianism and narcissism. It sometimes exhibits ambivalent sexism, leans slightly toward masculinity, is moderately anxious but mostly not depressive (but not always). It shows human-average numerical literacy and has cognitive reflection abilities that are above human average for verbal tasks.
A Unifying Multi-sampling-ratio CS-MRI Framework With Two-grid-cycle Correction and Geometric Prior Distillation
May 14, 2022
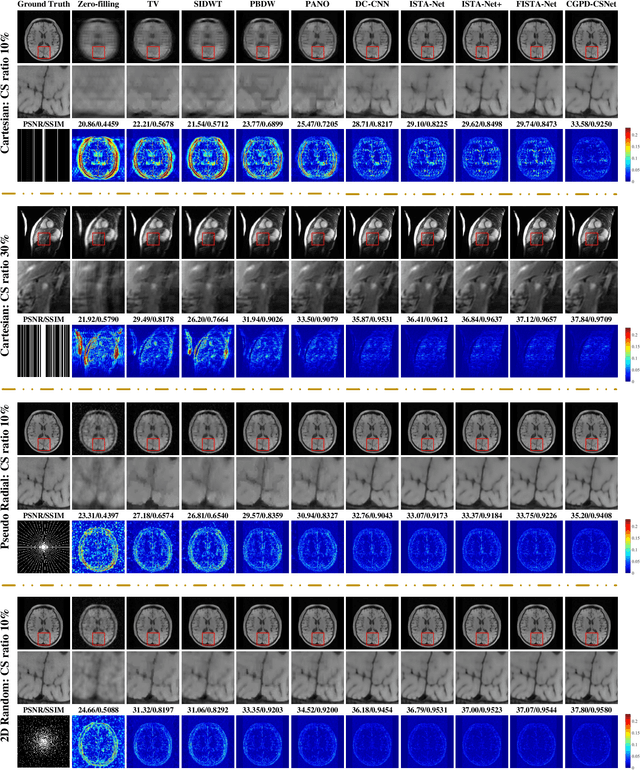
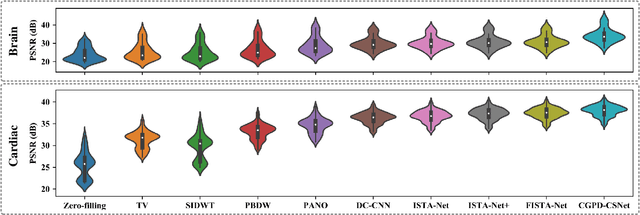
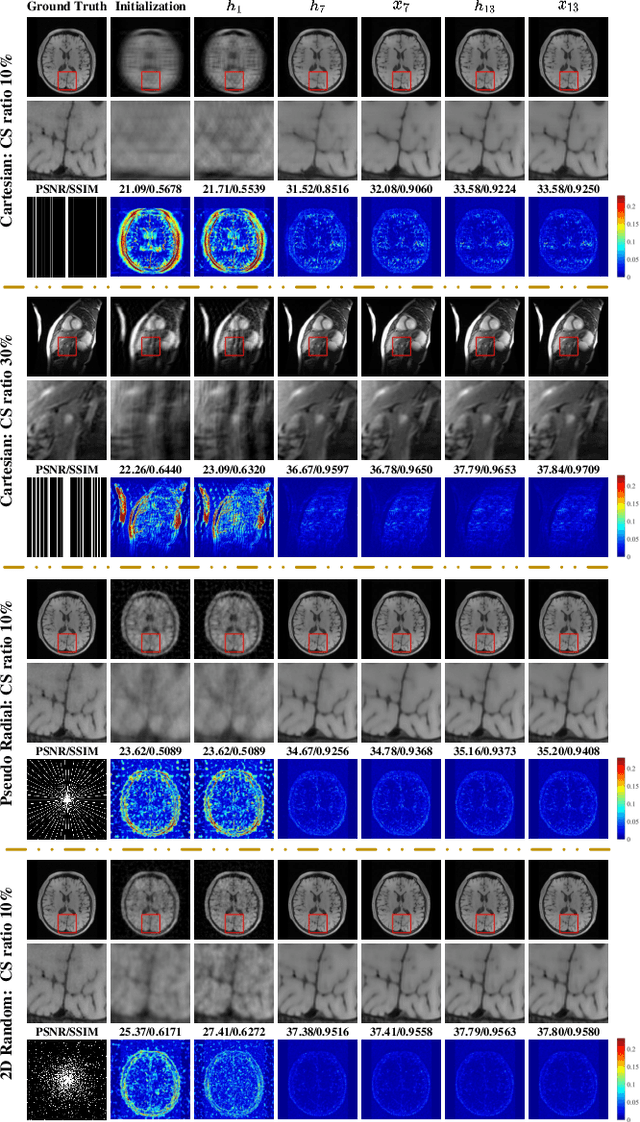
CS is an efficient method to accelerate the acquisition of MR images from under-sampled k-space data. Although existing deep learning CS-MRI methods have achieved considerably impressive performance, explainability and generalizability continue to be challenging for such methods since most of them are not flexible enough to handle multi-sampling-ratio reconstruction assignments, often the transition from mathematical analysis to network design not always natural enough. In this work, to tackle explainability and generalizability, we propose a unifying deep unfolding multi-sampling-ratio CS-MRI framework, by merging advantages of model-based and deep learning-based methods. The combined approach offers more generalizability than previous works whereas deep learning gains explainability through a geometric prior module. Inspired by multigrid algorithm, we first embed the CS-MRI-based optimization algorithm into correction-distillation scheme that consists of three ingredients: pre-relaxation module, correction module and geometric prior distillation module. Furthermore, we employ a condition module to learn adaptively step-length and noise level from compressive sampling ratio in every stage, which enables the proposed framework to jointly train multi-ratio tasks through a single model. The proposed model can not only compensate the lost contextual information of reconstructed image which is refined from low frequency error in geometric characteristic k-space, but also integrate the theoretical guarantee of model-based methods and the superior reconstruction performances of deep learning-based methods. All physical-model parameters are learnable, and numerical experiments show that our framework outperforms state-of-the-art methods in terms of qualitative and quantitative evaluations.
Catch the Ball: Accurate High-Speed Motions for Mobile Manipulators via Inverse Dynamics Learning
Mar 17, 2020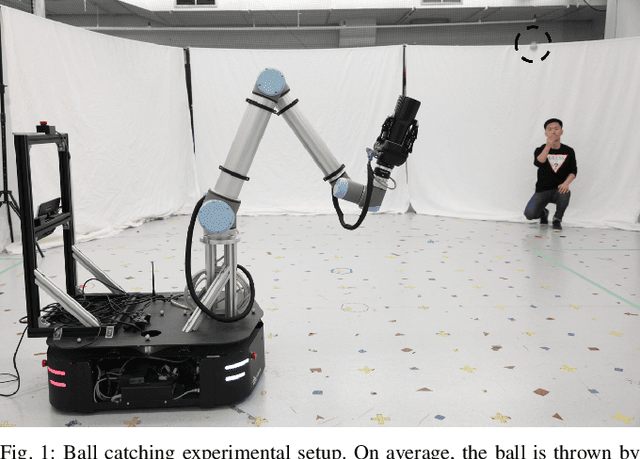
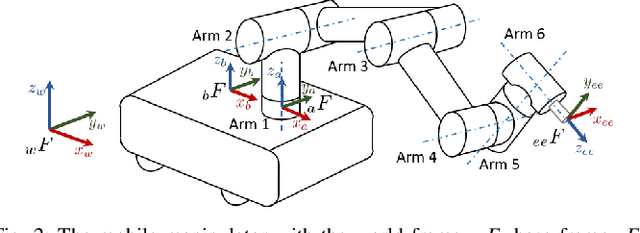

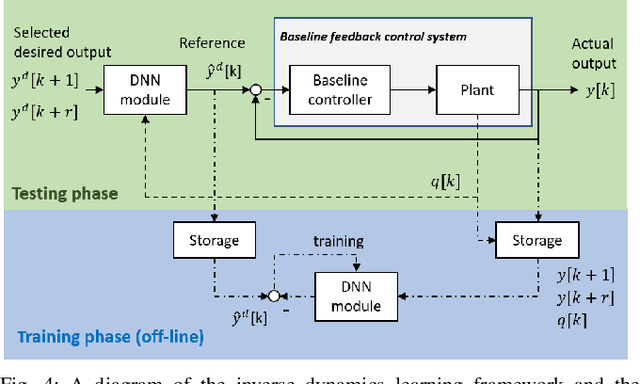
Mobile manipulators consist of a mobile platform equipped with one or more robot arms and are of interest for a wide array of challenging tasks because of their extended workspace and dexterity. Typically, mobile manipulators are deployed in slow-motion collaborative robot scenarios. In this paper, we consider scenarios where accurate high-speed motions are required. We introduce a framework for this regime of tasks including two main components: (i) a bi-level motion optimization algorithm for real-time trajectory generation, which relies on Sequential Quadratic Programming (SQP) and Quadratic Programming (QP), respectively; and (ii) a learning-based controller optimized for precise tracking of high-speed motions via a learned inverse dynamics model. We evaluate our framework with a mobile manipulator platform through numerous high-speed ball catching experiments, where we show a success rate of 85.33%. To the best of our knowledge, this success rate exceeds the reported performance of existing related systems and sets a new state of the art.