 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRobust Assembly Progress Estimation via Deep Metric Learning
Jan 01, 2026In recent years, the advancement of AI technologies has accelerated the development of smart factories. In particular, the automatic monitoring of product assembly progress is crucial for improving operational efficiency, minimizing the cost of discarded parts, and maximizing factory productivity. However, in cases where assembly tasks are performed manually over multiple days, implementing smart factory systems remains a challenge. Previous work has proposed Anomaly Triplet-Net, which estimates assembly progress by applying deep metric learning to the visual features of products. Nevertheless, when visual changes between consecutive tasks are subtle, misclassification often occurs. To address this issue, this paper proposes a robust system for estimating assembly progress, even in cases of occlusion or minimal visual change, using a small-scale dataset. Our method leverages a Quadruplet Loss-based learning approach for anomaly images and introduces a custom data loader that strategically selects training samples to enhance estimation accuracy. We evaluated our approach using a image datasets: captured during desktop PC assembly. The proposed Anomaly Quadruplet-Net outperformed existing methods on the dataset. Specifically, it improved the estimation accuracy by 1.3% and reduced misclassification between adjacent tasks by 1.9% in the desktop PC dataset and demonstrating the effectiveness of the proposed method.
Anomaly Triplet-Net: Progress Recognition Model Using Deep Metric Learning Considering Occlusion for Manual Assembly Work
Jan 07, 2025In this paper, a progress recognition method consider occlusion using deep metric learning is proposed to visualize the product assembly process in a factory. First, the target assembly product is detected from images acquired from a fixed-point camera installed in the factory using a deep learning-based object detection method. Next, the detection area is cropped from the image. Finally, by using a classification method based on deep metric learning on the cropped image, the progress of the product assembly work is estimated as a rough progress step. As a specific progress estimation model, we propose an Anomaly Triplet-Net that adds anomaly samples to Triplet Loss for progress estimation considering occlusion. In experiments, an 82.9% success rate is achieved for the progress estimation method using Anomaly Triplet-Net. We also experimented with the practicality of the sequence of detection, cropping, and progression estimation, and confirmed the effectiveness of the overall system.
* This paper has been peer-reviewed, revised, and published in Advanced Robotics
Three-dimensional Human Tracking of a Mobile Robot by Fusion of Tracking Results of Two Cameras
Jul 03, 2020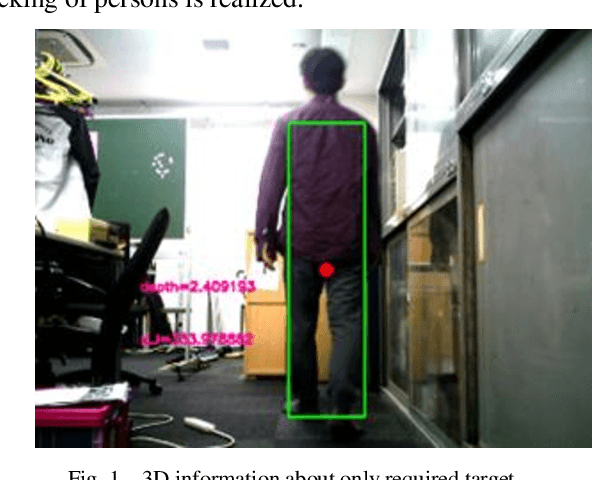
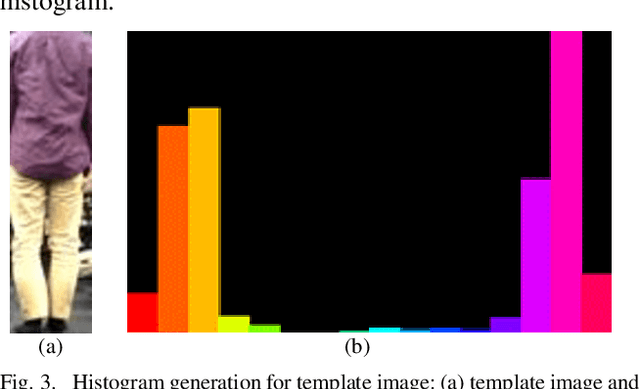
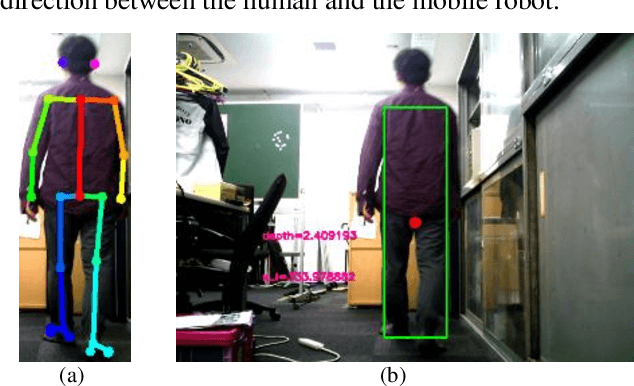

This paper proposes a process that uses two cameras to obtain three-dimensional (3D) information of a target object for human tracking. Results of human detection and tracking from two cameras are integrated to obtain the 3D information. OpenPose is used for human detection. In the case of a general processing a stereo camera, a range image of the entire scene is acquired as precisely as possible, and then the range image is processed. However, there are problems such as incorrect matching and computational cost for the calibration process. A new stereo vision framework is proposed to cope with the problems. The effectiveness of the proposed framework and the method is verified through target-tracking experiments.
SLAM using ICP and graph optimization considering physical properties of environment
Jul 01, 2020
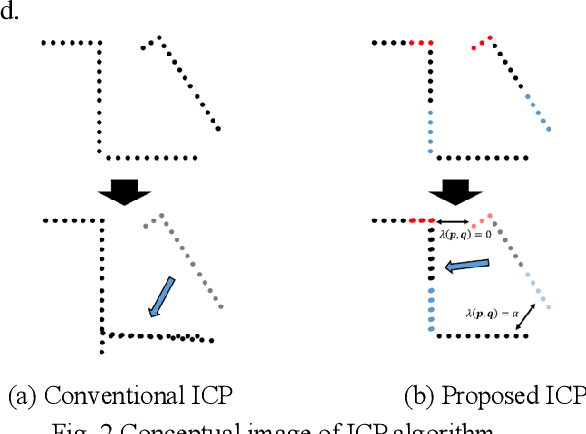

This paper describes a novel SLAM (simultaneous localization and mapping) scheme based on scan matching in an environment including various physical properties.
Expandable YOLO: 3D Object Detection from RGB-D Images
Jun 26, 2020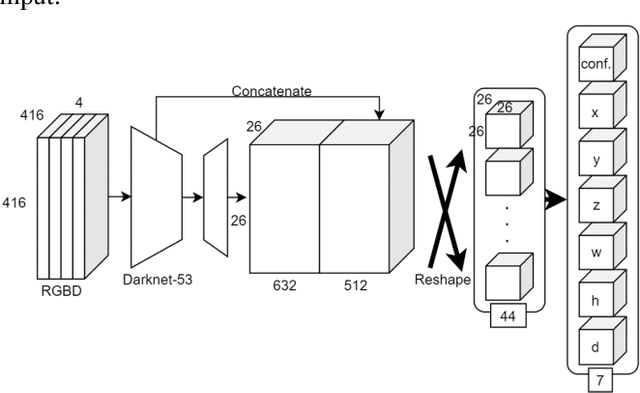


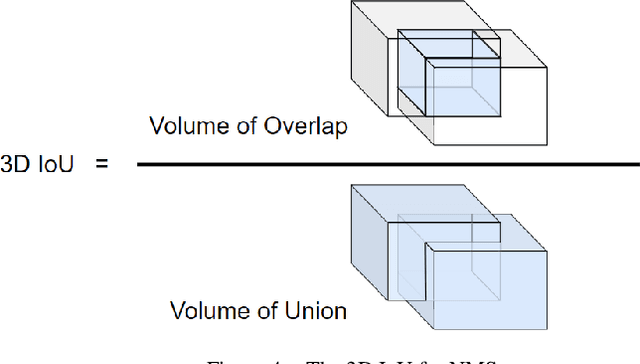
This paper aims at constructing a light-weight object detector that inputs a depth and a color image from a stereo camera. Specifically, by extending the network architecture of YOLOv3 to 3D in the middle, it is possible to output in the depth direction. In addition, Intersection over Uninon (IoU) in 3D space is introduced to confirm the accuracy of region extraction results. In the field of deep learning, object detectors that use distance information as input are actively studied for utilizing automated driving. However, the conventional detector has a large network structure, and the real-time property is impaired. The effectiveness of the detector constructed as described above is verified using datasets. As a result of this experiment, the proposed model is able to output 3D bounding boxes and detect people whose part of the body is hidden. Further, the processing speed of the model is 44.35 fps.
Anomaly Detection Based on Deep Learning Using Video for Prevention of Industrial Accidents
May 28, 2020
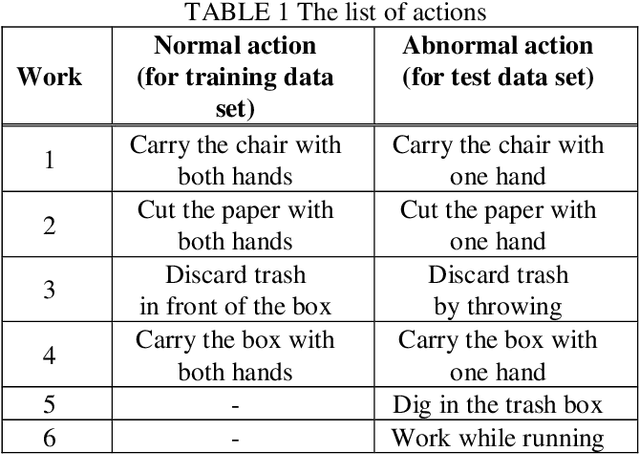
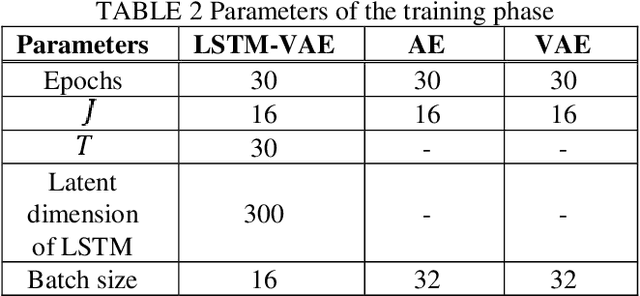
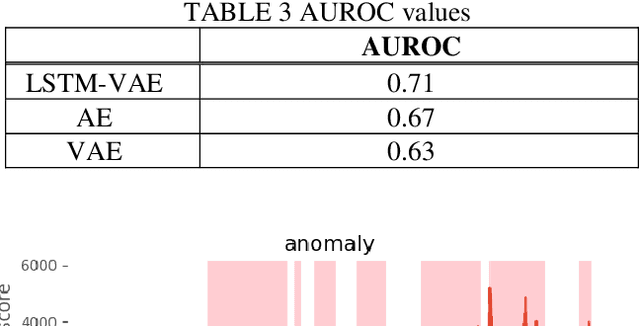
This paper proposes an anomaly detection method for the prevention of industrial accidents using machine learning technology.