 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge360$^\circ$ Depth Estimation from Multiple Fisheye Images with Origami Crown Representation of Icosahedron
Jul 14, 2020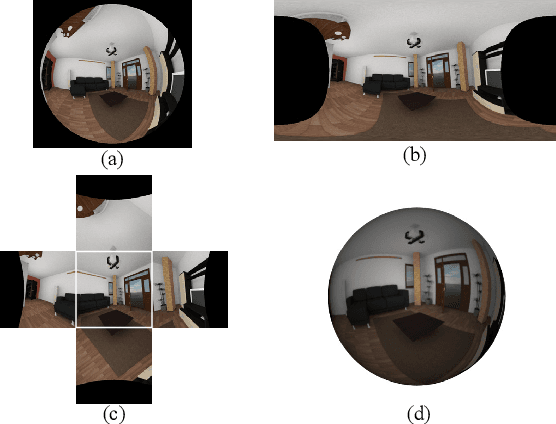
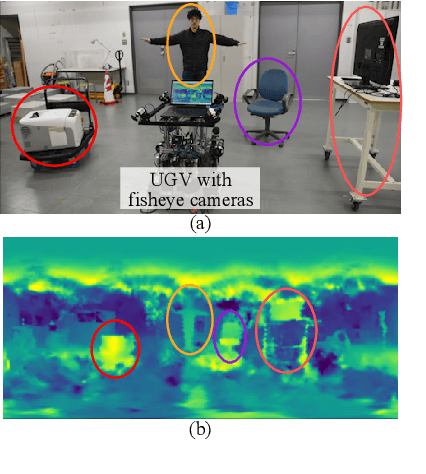
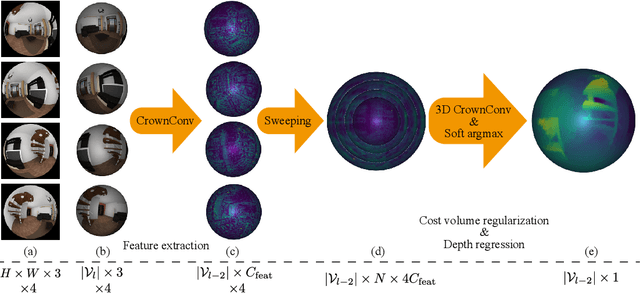
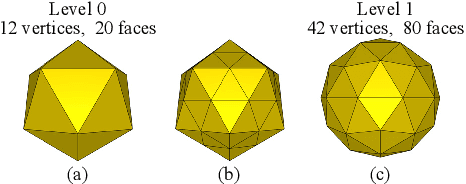
In this study, we present a method for all-around depth estimation from multiple omnidirectional images for indoor environments. In particular, we focus on plane-sweeping stereo as the method for depth estimation from the images. We propose a new icosahedron-based representation and ConvNets for omnidirectional images, which we name "CrownConv" because the representation resembles a crown made of origami. CrownConv can be applied to both fisheye images and equirectangular images to extract features. Furthermore, we propose icosahedron-based spherical sweeping for generating the cost volume on an icosahedron from the extracted features. The cost volume is regularized using the three-dimensional CrownConv, and the final depth is obtained by depth regression from the cost volume. Our proposed method is robust to camera alignments by using the extrinsic camera parameters; therefore, it can achieve precise depth estimation even when the camera alignment differs from that in the training dataset. We evaluate the proposed model on synthetic datasets and demonstrate its effectiveness. As our proposed method is computationally efficient, the depth is estimated from four fisheye images in less than a second using a laptop with a GPU. Therefore, it is suitable for real-world robotics applications. Our source code is available at https://github.com/matsuren/crownconv360depth.
SLAM using ICP and graph optimization considering physical properties of environment
Jul 01, 2020
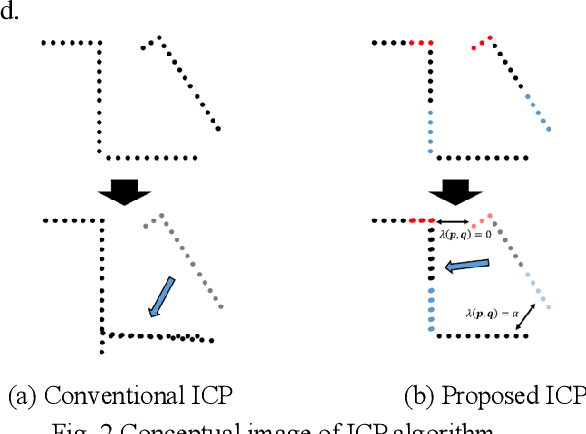

This paper describes a novel SLAM (simultaneous localization and mapping) scheme based on scan matching in an environment including various physical properties.