Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSLAM using ICP and graph optimization considering physical properties of environment
Paper and Code
Jul 01, 2020
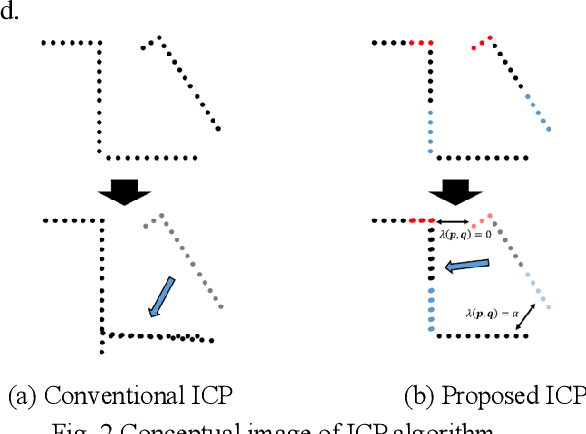

This paper describes a novel SLAM (simultaneous localization and mapping) scheme based on scan matching in an environment including various physical properties.
* 5 pages, 11 figures
View paper on