Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThree-dimensional Human Tracking of a Mobile Robot by Fusion of Tracking Results of Two Cameras
Jul 03, 2020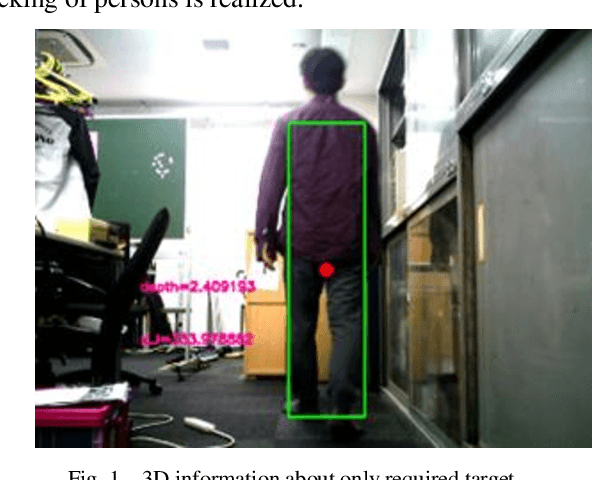
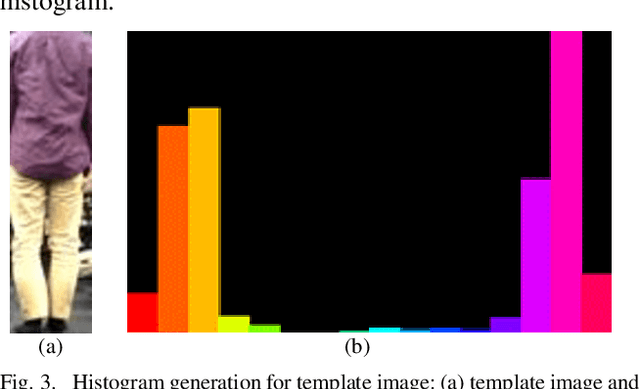
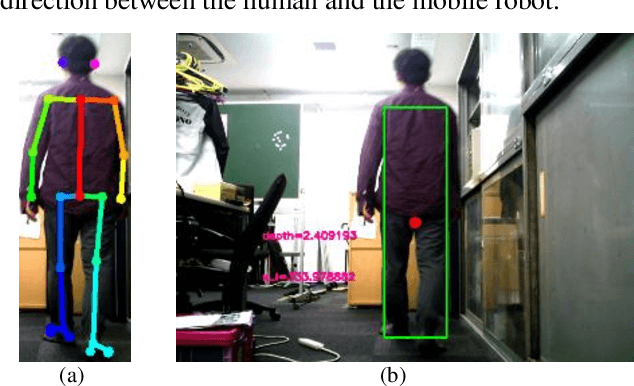

This paper proposes a process that uses two cameras to obtain three-dimensional (3D) information of a target object for human tracking. Results of human detection and tracking from two cameras are integrated to obtain the 3D information. OpenPose is used for human detection. In the case of a general processing a stereo camera, a range image of the entire scene is acquired as precisely as possible, and then the range image is processed. However, there are problems such as incorrect matching and computational cost for the calibration process. A new stereo vision framework is proposed to cope with the problems. The effectiveness of the proposed framework and the method is verified through target-tracking experiments.
* 4 pages, 11 figures
Via