 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLinking vision and motion for self-supervised object-centric perception
Jul 14, 2023Object-centric representations enable autonomous driving algorithms to reason about interactions between many independent agents and scene features. Traditionally these representations have been obtained via supervised learning, but this decouples perception from the downstream driving task and could harm generalization. In this work we adapt a self-supervised object-centric vision model to perform object decomposition using only RGB video and the pose of the vehicle as inputs. We demonstrate that our method obtains promising results on the Waymo Open perception dataset. While object mask quality lags behind supervised methods or alternatives that use more privileged information, we find that our model is capable of learning a representation that fuses multiple camera viewpoints over time and successfully tracks many vehicles and pedestrians in the dataset. Code for our model is available at https://github.com/wayveai/SOCS.
Discretizing Dynamics for Maximum Likelihood Constraint Inference
Sep 10, 2021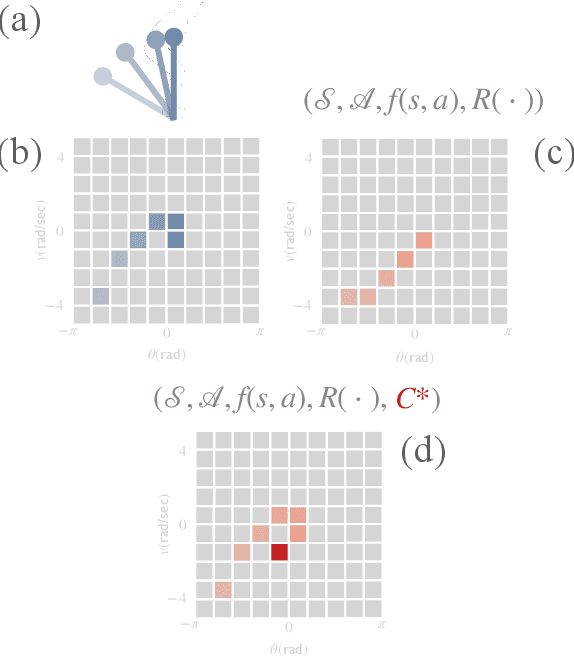
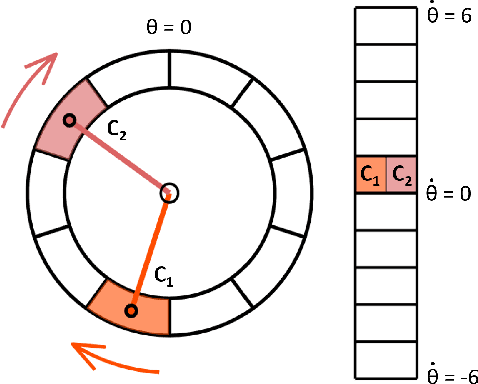
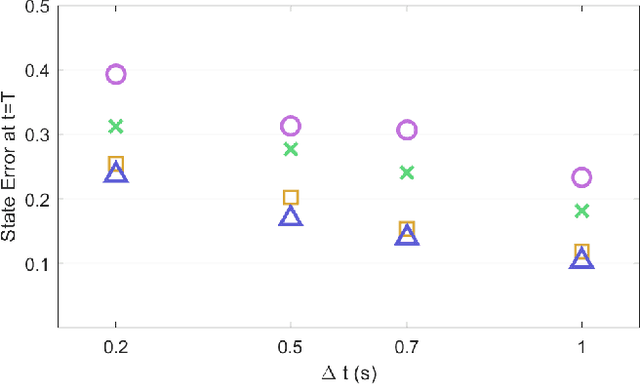
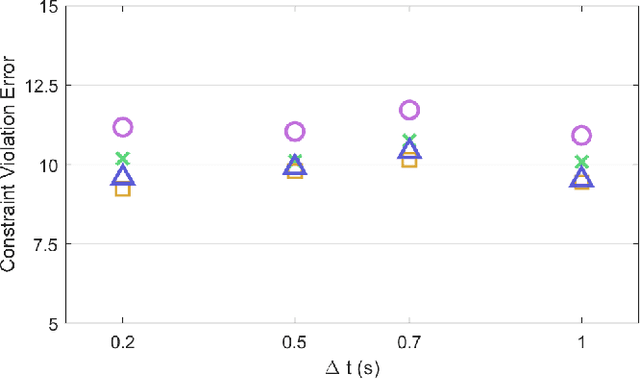
Maximum likelihood constraint inference is a powerful technique for identifying unmodeled constraints that affect the behavior of a demonstrator acting under a known objective function. However, it was originally formulated only for discrete state-action spaces. Continuous dynamics are more useful for modeling many real-world systems of interest, including the movements of humans and robots. We present a method to generate a tabular state-action space that approximates continuous dynamics and can be used for constraint inference on demonstrations that obey the true system dynamics. We then demonstrate accurate constraint inference on nonlinear pendulum systems with 2- and 4-dimensional state spaces, and show that performance is robust to a range of hyperparameters. The demonstrations are not required to be fully optimal with respect to the objective, and the most likely constraints can be identified even when demonstrations cover only a small portion of the state space. For these reasons, the proposed approach may be especially useful for inferring constraints on human demonstrators, which has important applications in human-robot interaction and biomechanical medicine.
Maximum Likelihood Constraint Inference from Stochastic Demonstrations
Feb 24, 2021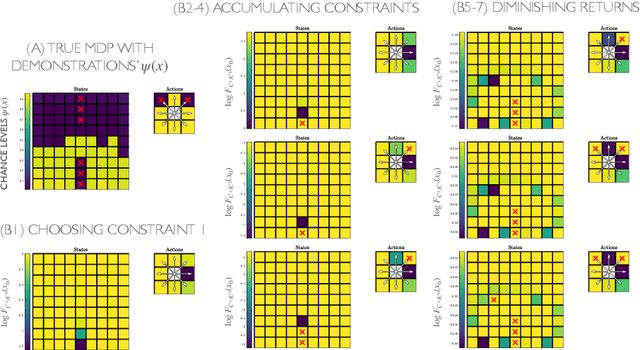
When an expert operates a perilous dynamic system, ideal constraint information is tacitly contained in their demonstrated trajectories and controls. The likelihood of these demonstrations can be computed, given the system dynamics and task objective, and the maximum likelihood constraints can be identified. Prior constraint inference work has focused mainly on deterministic models. Stochastic models, however, can capture the uncertainty and risk tolerance that are often present in real systems of interest. This paper extends maximum likelihood constraint inference to stochastic applications by using maximum causal entropy likelihoods. Furthermore, we propose an efficient algorithm that computes constraint likelihood and risk tolerance in a unified Bellman backup, allowing us to generalize to stochastic systems without increasing computational complexity.