 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeBi-level Trajectory Optimization on Uneven Terrains with Differentiable Wheel-Terrain Interaction Model
Apr 11, 2024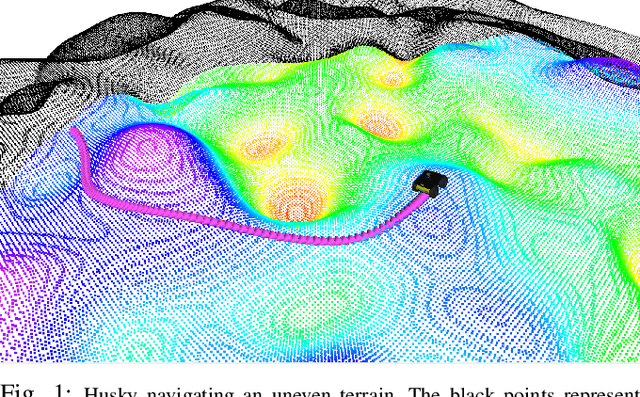
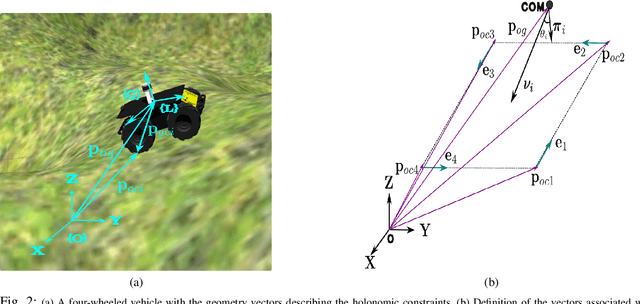
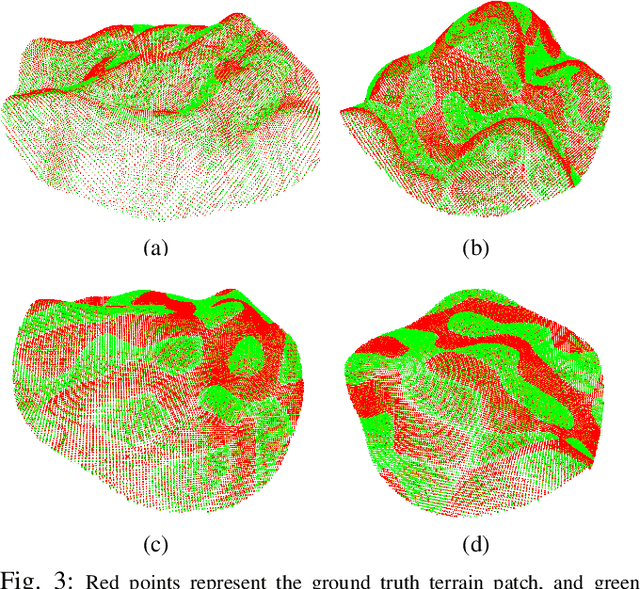
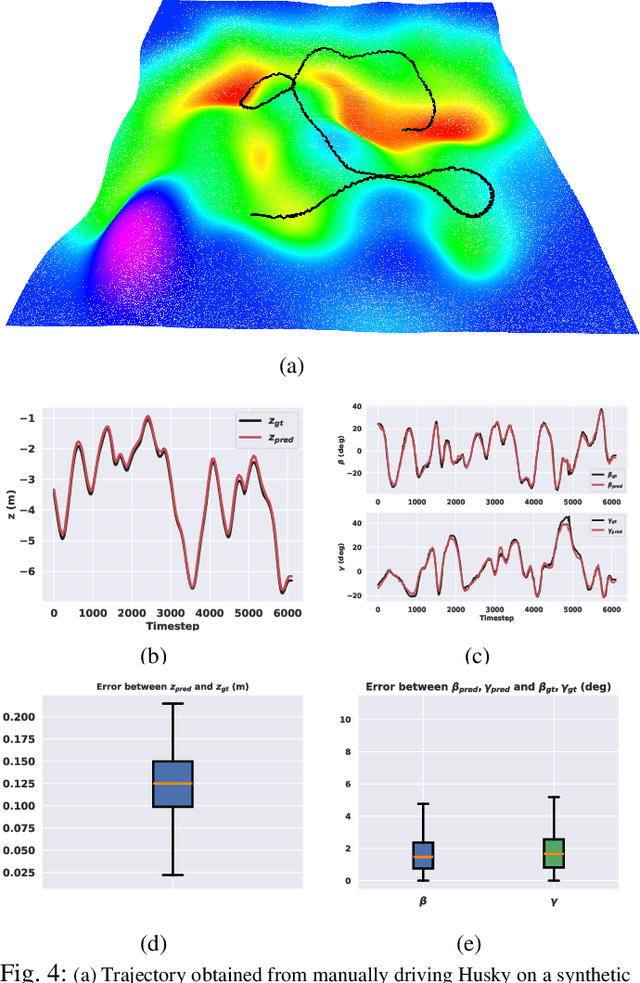
Navigation of wheeled vehicles on uneven terrain necessitates going beyond the 2D approaches for trajectory planning. Specifically, it is essential to incorporate the full 6dof variation of vehicle pose and its associated stability cost in the planning process. To this end, most recent works aim to learn a neural network model to predict the vehicle evolution. However, such approaches are data-intensive and fraught with generalization issues. In this paper, we present a purely model-based approach that just requires the digital elevation information of the terrain. Specifically, we express the wheel-terrain interaction and 6dof pose prediction as a non-linear least squares (NLS) problem. As a result, trajectory planning can be viewed as a bi-level optimization. The inner optimization layer predicts the pose on the terrain along a given trajectory, while the outer layer deforms the trajectory itself to reduce the stability and kinematic costs of the pose. We improve the state-of-the-art in the following respects. First, we show that our NLS based pose prediction closely matches the output from a high-fidelity physics engine. This result coupled with the fact that we can query gradients of the NLS solver, makes our pose predictor, a differentiable wheel-terrain interaction model. We further leverage this differentiability to efficiently solve the proposed bi-level trajectory optimization problem. Finally, we perform extensive experiments, and comparison with a baseline to showcase the effectiveness of our approach in obtaining smooth, stable trajectories.
ATPPNet: Attention based Temporal Point cloud Prediction Network
Jan 30, 2024Point cloud prediction is an important yet challenging task in the field of autonomous driving. The goal is to predict future point cloud sequences that maintain object structures while accurately representing their temporal motion. These predicted point clouds help in other subsequent tasks like object trajectory estimation for collision avoidance or estimating locations with the least odometry drift. In this work, we present ATPPNet, a novel architecture that predicts future point cloud sequences given a sequence of previous time step point clouds obtained with LiDAR sensor. ATPPNet leverages Conv-LSTM along with channel-wise and spatial attention dually complemented by a 3D-CNN branch for extracting an enhanced spatio-temporal context to recover high quality fidel predictions of future point clouds. We conduct extensive experiments on publicly available datasets and report impressive performance outperforming the existing methods. We also conduct a thorough ablative study of the proposed architecture and provide an application study that highlights the potential of our model for tasks like odometry estimation.
NeuroSMPC: A Neural Network guided Sampling Based MPC for On-Road Autonomous Driving
Oct 19, 2023



In this paper we show an effective means of integrating data driven frameworks to sampling based optimal control to vastly reduce the compute time for easy adoption and adaptation to real time applications such as on-road autonomous driving in the presence of dynamic actors. Presented with training examples, a spatio-temporal CNN learns to predict the optimal mean control over a finite horizon that precludes further resampling, an iterative process that makes sampling based optimal control formulations difficult to adopt in real time settings. Generating control samples around the network-predicted optimal mean retains the advantage of sample diversity while enabling real time rollout of trajectories that avoids multiple dynamic obstacles in an on-road navigation setting. Further the 3D CNN architecture implicitly learns the future trajectories of the dynamic agents in the scene resulting in successful collision free navigation despite no explicit future trajectory prediction. We show performance gain over multiple baselines in a number of on-road scenes through closed loop simulations in CARLA. We also showcase the real world applicability of our system by running it on our custom Autonomous Driving Platform (AutoDP).