 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge$π$-MPPI: A Projection-based Model Predictive Path Integral Scheme for Smooth Optimal Control of Fixed-Wing Aerial Vehicles
Apr 16, 2025Model Predictive Path Integral (MPPI) is a popular sampling-based Model Predictive Control (MPC) algorithm for nonlinear systems. It optimizes trajectories by sampling control sequences and averaging them. However, a key issue with MPPI is the non-smoothness of the optimal control sequence, leading to oscillations in systems like fixed-wing aerial vehicles (FWVs). Existing solutions use post-hoc smoothing, which fails to bound control derivatives. This paper introduces a new approach: we add a projection filter $\pi$ to minimally correct control samples, ensuring bounds on control magnitude and higher-order derivatives. The filtered samples are then averaged using MPPI, leading to our $\pi$-MPPI approach. We minimize computational overhead by using a neural accelerated custom optimizer for the projection filter. $\pi$-MPPI offers a simple way to achieve arbitrary smoothness in control sequences. While we focus on FWVs, this projection filter can be integrated into any MPPI pipeline. Applied to FWVs, $\pi$-MPPI is easier to tune than the baseline, resulting in smoother, more robust performance.
Bi-level Trajectory Optimization on Uneven Terrains with Differentiable Wheel-Terrain Interaction Model
Apr 11, 2024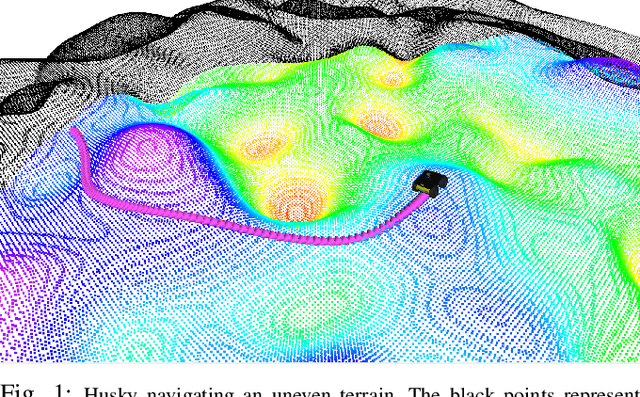
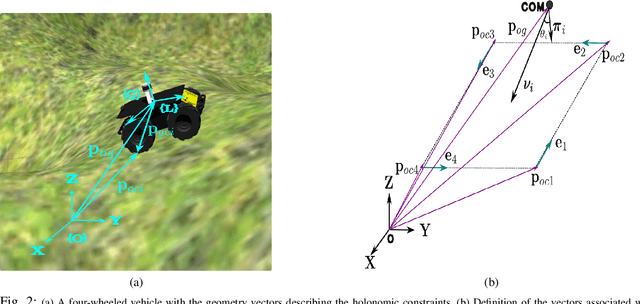
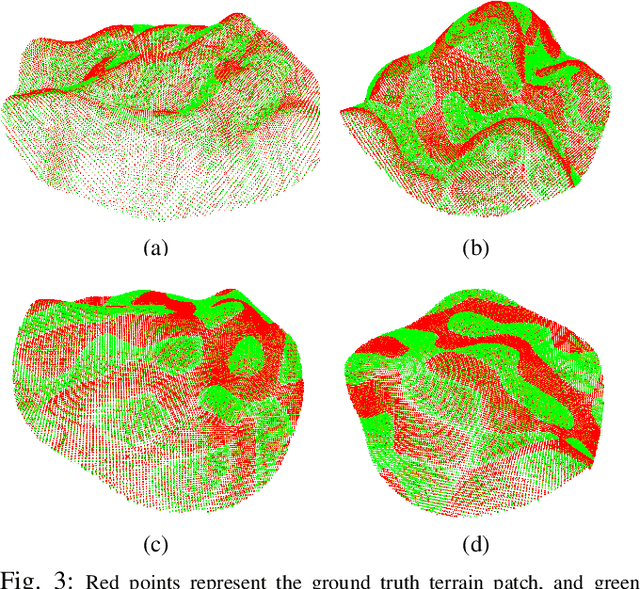
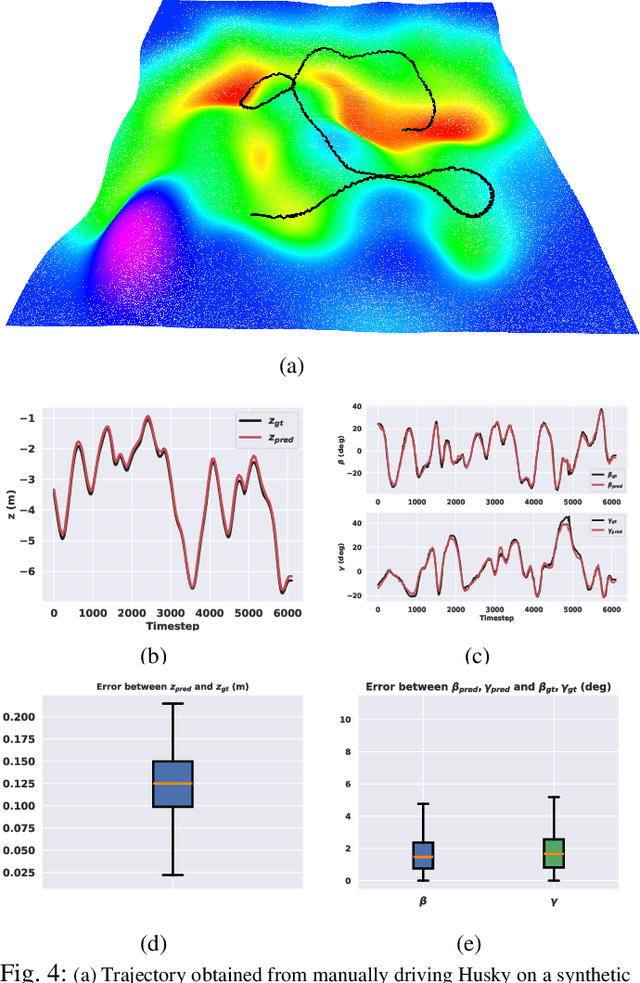
Navigation of wheeled vehicles on uneven terrain necessitates going beyond the 2D approaches for trajectory planning. Specifically, it is essential to incorporate the full 6dof variation of vehicle pose and its associated stability cost in the planning process. To this end, most recent works aim to learn a neural network model to predict the vehicle evolution. However, such approaches are data-intensive and fraught with generalization issues. In this paper, we present a purely model-based approach that just requires the digital elevation information of the terrain. Specifically, we express the wheel-terrain interaction and 6dof pose prediction as a non-linear least squares (NLS) problem. As a result, trajectory planning can be viewed as a bi-level optimization. The inner optimization layer predicts the pose on the terrain along a given trajectory, while the outer layer deforms the trajectory itself to reduce the stability and kinematic costs of the pose. We improve the state-of-the-art in the following respects. First, we show that our NLS based pose prediction closely matches the output from a high-fidelity physics engine. This result coupled with the fact that we can query gradients of the NLS solver, makes our pose predictor, a differentiable wheel-terrain interaction model. We further leverage this differentiability to efficiently solve the proposed bi-level trajectory optimization problem. Finally, we perform extensive experiments, and comparison with a baseline to showcase the effectiveness of our approach in obtaining smooth, stable trajectories.
Multi-AAV Cooperative Path Planning using Nonlinear Model Predictive Control with Localization Constraints
Jan 23, 2022


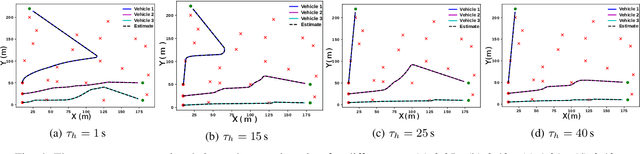
In this paper, we solve a joint cooperative localization and path planning problem for a group of Autonomous Aerial Vehicles (AAVs) in GPS-denied areas using nonlinear model predictive control (NMPC). A moving horizon estimator (MHE) is used to estimate the vehicle states with the help of relative bearing information to known landmarks and other vehicles. The goal of the NMPC is to devise optimal paths for each vehicle between a given source and destination while maintaining desired localization accuracy. Estimating localization covariance in the NMPC is computationally intensive, hence we develop an approximate analytical closed form expression based on the relationship between covariance and path lengths to landmarks. Using this expression while computing NMPC commands reduces the computational complexity significantly. We present numerical simulations to validate the proposed approach for different numbers of vehicles and landmark configurations. We also compare the results with EKF-based estimation to show the superiority of the proposed closed form approach.