 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGiving Robots a Voice: Human-in-the-Loop Voice Creation and open-ended Labeling
Feb 07, 2024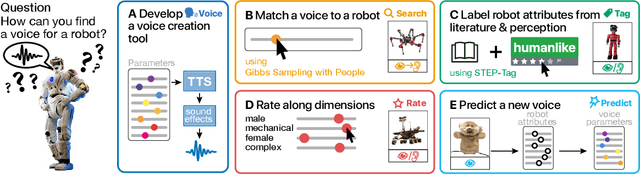
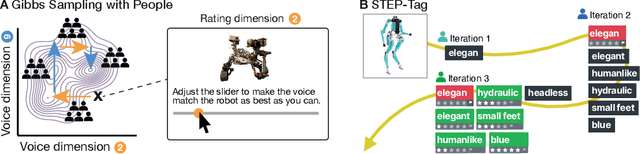
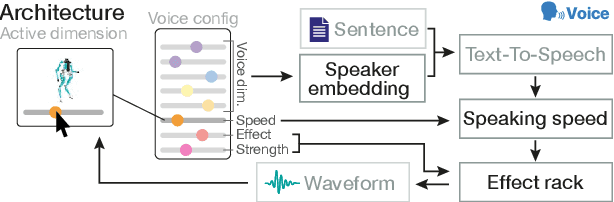
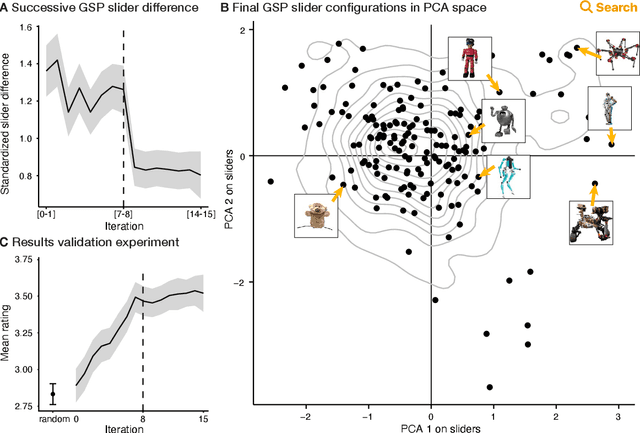
Speech is a natural interface for humans to interact with robots. Yet, aligning a robot's voice to its appearance is challenging due to the rich vocabulary of both modalities. Previous research has explored a few labels to describe robots and tested them on a limited number of robots and existing voices. Here, we develop a robot-voice creation tool followed by large-scale behavioral human experiments (N=2,505). First, participants collectively tune robotic voices to match 175 robot images using an adaptive human-in-the-loop pipeline. Then, participants describe their impression of the robot or their matched voice using another human-in-the-loop paradigm for open-ended labeling. The elicited taxonomy is then used to rate robot attributes and to predict the best voice for an unseen robot. We offer a web interface to aid engineers in customizing robot voices, demonstrating the synergy between cognitive science and machine learning for engineering tools.
Nichtverbales Verhalten sozialer Roboter: Bewegungen, deren Bedeutung und die Technik dahinter
Jan 21, 2023Nichtverbale Signale sind ein elementarer Bestandteil der menschlichen Kommunikation. Sie erf\"ullen eine Vielzahl von Funktionen bei der Kl\"arung von Mehrdeutigkeiten, der subtilen Aushandlung von Rollen oder dem Ausdruck dessen, was im Inneren der Gespr\"achspartner vorgeht. Viele Studien mit sozial-interaktiven Robotern zeigen, dass vom Menschen inspirierte Bewegungsmuster \"ahnlich interpretiert werden wie die von realen Personen. Dieses Kapitel erl\"autert daher die wichtigsten Funktionen, welche die jeweiligen Bewegungsmuster in der Kommunikation erf\"ullen, und gibt einen \"Uberblick dar\"uber, wie sie auf Roboter \"ubertragen werden k\"onnen. -- Non-verbal signals are a fundamental part of human communication. They serve a variety of functions in clarifying ambiguities, subtly negotiating roles, or expressing what is going on inside the interlocutors. Many studies with socially-interactive robots show that human-inspired movement patterns are interpreted similarly to those of real people. This chapter therefore explains the most important functions that the respective movement patterns fulfill in communication and gives an overview of how they can be transferred to robots.