 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGiving Robots a Voice: Human-in-the-Loop Voice Creation and open-ended Labeling
Paper and Code
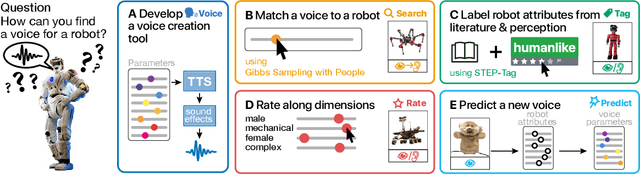
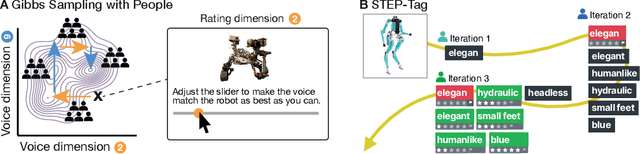
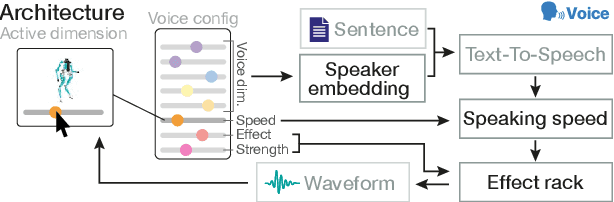
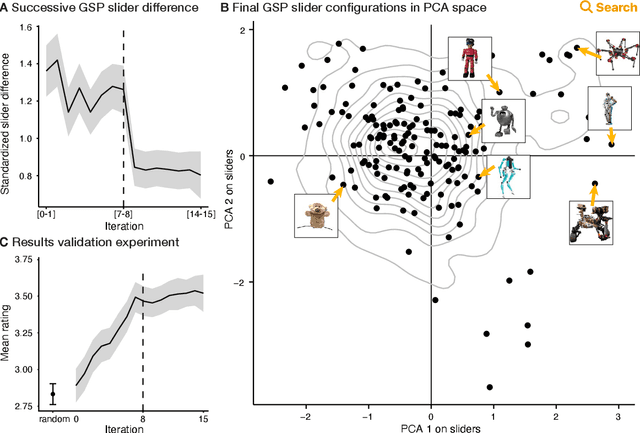
Speech is a natural interface for humans to interact with robots. Yet, aligning a robot's voice to its appearance is challenging due to the rich vocabulary of both modalities. Previous research has explored a few labels to describe robots and tested them on a limited number of robots and existing voices. Here, we develop a robot-voice creation tool followed by large-scale behavioral human experiments (N=2,505). First, participants collectively tune robotic voices to match 175 robot images using an adaptive human-in-the-loop pipeline. Then, participants describe their impression of the robot or their matched voice using another human-in-the-loop paradigm for open-ended labeling. The elicited taxonomy is then used to rate robot attributes and to predict the best voice for an unseen robot. We offer a web interface to aid engineers in customizing robot voices, demonstrating the synergy between cognitive science and machine learning for engineering tools.