 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign, Contact Modeling, and Collision-inclusive Planning of a Dual-stiffness Aerial RoboT (DART)
Apr 26, 2025



Collision-resilient quadrotors have gained significant attention given their potential for operating in cluttered environments and leveraging impacts to perform agile maneuvers. However, existing designs are typically single-mode: either safeguarded by propeller guards that prevent deformation or deformable but lacking rigidity, which is crucial for stable flight in open environments. This paper introduces DART, a Dual-stiffness Aerial RoboT, that adapts its post-collision response by either engaging a locking mechanism for a rigid mode or disengaging it for a flexible mode, respectively. Comprehensive characterization tests highlight the significant difference in post collision responses between its rigid and flexible modes, with the rigid mode offering seven times higher stiffness compared to the flexible mode. To understand and harness the collision dynamics, we propose a novel collision response prediction model based on the linear complementarity system theory. We demonstrate the accuracy of predicting collision forces for both the rigid and flexible modes of DART. Experimental results confirm the accuracy of the model and underscore its potential to advance collision-inclusive trajectory planning in aerial robotics.
To Collide or Not To Collide -- Exploiting Passive Deformable Quadrotors for Contact-Rich Tasks
May 26, 2023



With an increase in aerial vehicle applications, passive deformable quadrotors are getting significant attention in the research community due to their potential to perform physical interaction tasks. Such quadrotors are capable of undergoing collisions, both planned and unplanned, which are harnessed to induce deformation and retain stability by dissipating collision energies. In this article, we utilize one such passive deforming quadrotor, XPLORER, to complete various contact-rich tasks by exploiting its compliant chassis via various impact-aware planning and control algorithms. At the core of these algorithms is a novel external wrench estimation technique developed specifically for the unique multi-linked structure of XPLORER's chassis. The external wrench information is then employed for designing interaction controllers to obtain three additional flight modes: static-wrench application, disturbance rejection and yielding to the disturbance. These modes are then incorporated into a novel online exploration scheme to enable navigation in unknown flight spaces with only tactile feedback and generate a map of the environment without requiring additional sensors. Experiments show the efficacy of this scheme to generate maps of the previously unexplored flight space with an accuracy of 96.72%. Finally, we develop a novel collision-aware trajectory planner (CATAAN) to generate minimum time maneuvers for waypoint tracking by integrating collision-induced state jumps for both elastic and inelastic cases. We experimentally validate that minimum time trajectories can be obtained with CATAAN leading to a 40.38% reduction of settling time accompanied by improved tracking performance of a root mean squared error in position within 0.5cm as compared to 3cm of conventional methods.
Adaptive Attitude Control for Foldable Quadrotors
Sep 18, 2022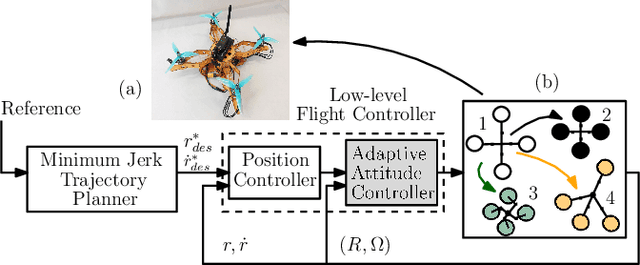
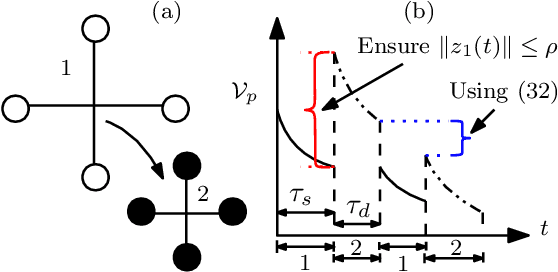
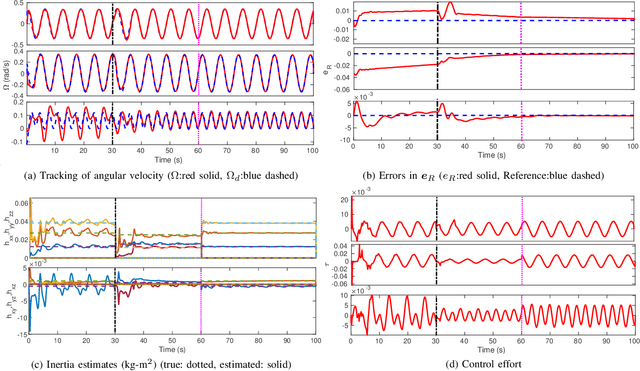
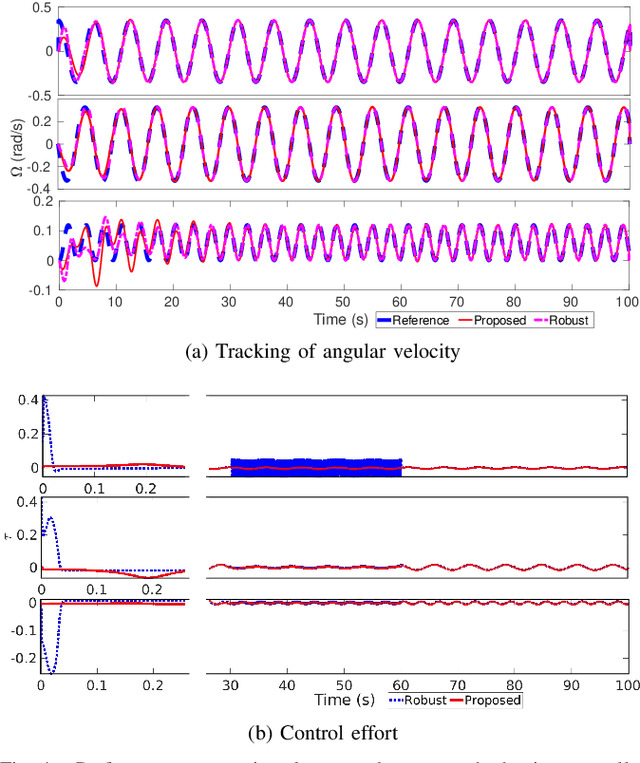
Recent quadrotor vehicles transcended conventional designs, emphasizing more on foldable and reconfigurable bodies. However, the state of the art still focuses on the mechanical feasibility of such designs with limited discussions on the tracking performance of the vehicle during configuration switching. In this paper, we propose a complete control and planning framework for attitude tracking during configuration switching and curbs any switch-based disturbances, which can lead to violation of safety constraints and cause crashes. The control framework includes a morphology-aware adaptive controller with a estimator to account for parameter variation and a minimum-jerk trajectory planner to achieve stable flights while switching. Stability analysis for attitude tracking is presented by employing the theory of switched systems and simulation results validate the proposed framework for a foldable quadrotor's flight through a passageway.
A Soft-Bodied Aerial Robot for Collision Resilience and Contact-Reactive Perching
May 02, 2022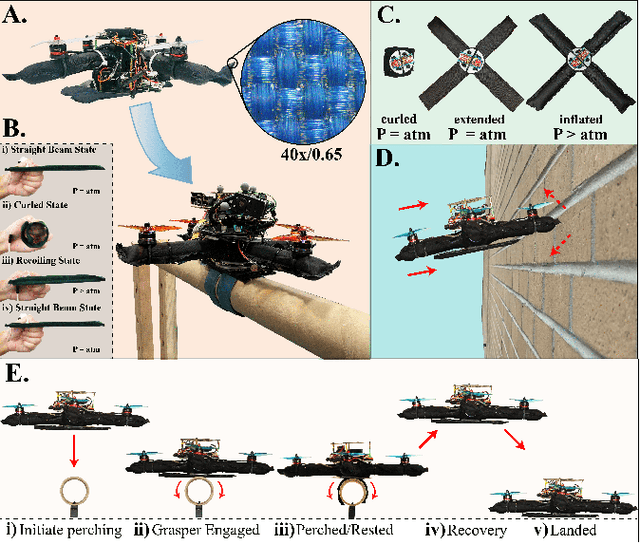
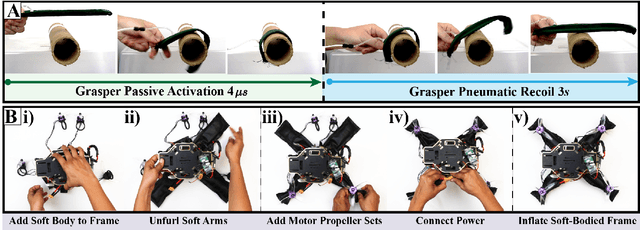
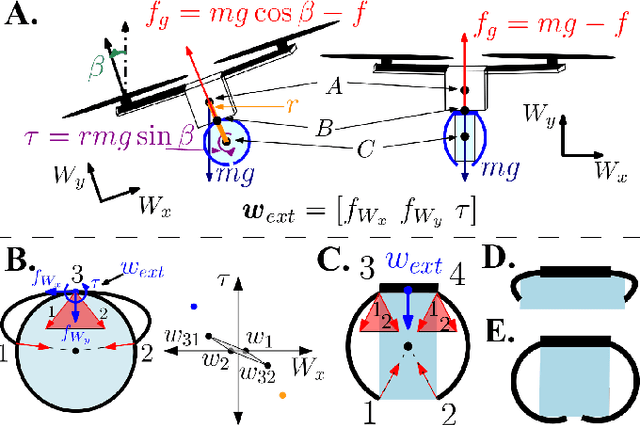
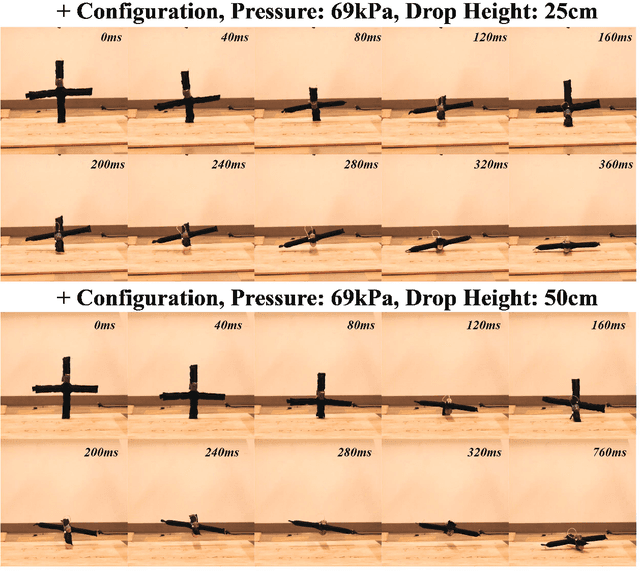
Compared to their biological counterparts, aerial robots demonstrate limited capabilities when tasked to interact in unstructured environments. Very often, the limitation lies in their inability to tolerate collisions and to successfully land, or perch, on objects of unknown shape. Over the past years, efforts to address this have introduced designs that incorporate mechanical impact protection and grasping/perching structures at the cost of reduced agility and flight time due to added weight and bulkiness. In this work, we develop a fabric-based, soft-bodied aerial robot (SoBAR) composed of both contact-reactive perching and embodied impact protection structures while remaining lightweight and streamlined. The robot is capable to 1) pneumatically vary its body stiffness for collision resilience and 2) utilize a hybrid fabric-based, bistable (HFB) grasper to perform passive grasping. When compared to conventional rigid drone frames the SoBAR successfully demonstrates its ability to dissipate impact from head-on collisions and maintain flight stability without any structural damage. Furthermore, in dynamic perching scenarios the HFB grasper is capable to convert impact energy upon contact into firm grasp through rapid body shape conforming in less than 4ms. We exhaustively study and offer insights for this novel perching scheme through grasping characterization, grasp wrench analysis, and experimental grasping validations in objects with various shapes. Finally, we demonstrate the complete control pipeline for SoBAR to approach an object, dynamically perch on it, recover from it, and land.
Collision Recovery Control of a Foldable Quadrotor
May 28, 2021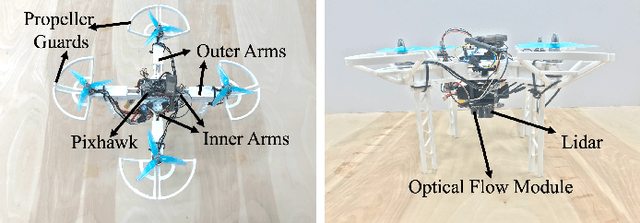
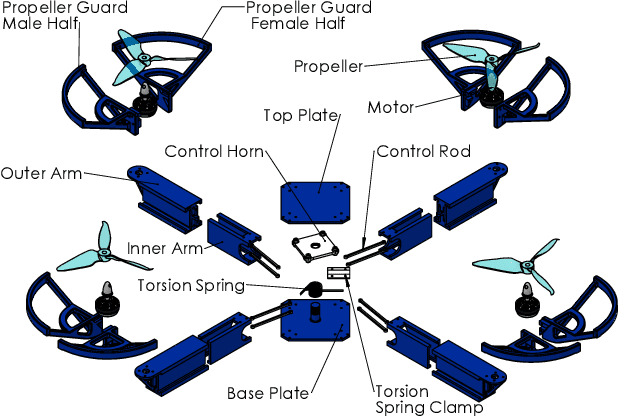
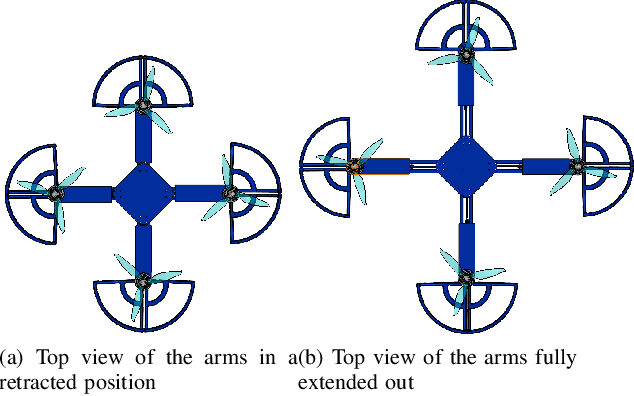
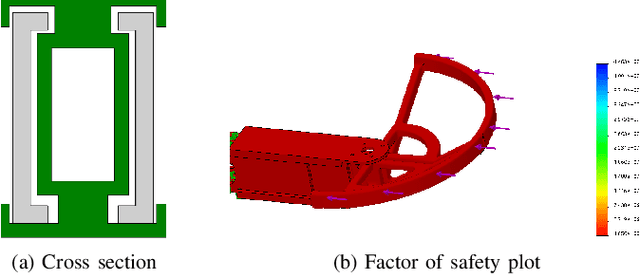
Autonomous missions of small unmanned aerial vehicles (UAVs) are prone to collisions owing to environmental disturbances and localization errors. Consequently, a UAV that can endure collisions and perform recovery control in critical aerial missions is desirable to prevent loss of the vehicle and/or payload. We address this problem by proposing a novel foldable quadrotor system which can sustain collisions and recover safely. The quadrotor is designed with integrated mechanical compliance using a torsional spring such that the impact time is increased and the net impact force on the main body is decreased. The post-collision dynamics is analysed and a recovery controller is proposed which stabilizes the system to a hovering location without additional collisions. Flight test results on the proposed and a conventional quadrotor demonstrate that for the former, integrated spring-damper characteristics reduce the rebound velocity and lead to simple recovery control algorithms in the event of unintended collisions as compared to a rigid quadrotor of the same dimension.
Design and Control of SQUEEZE: A Spring-augmented QUadrotor for intEractions with the Environment to squeeZE-and-fly
Oct 24, 2020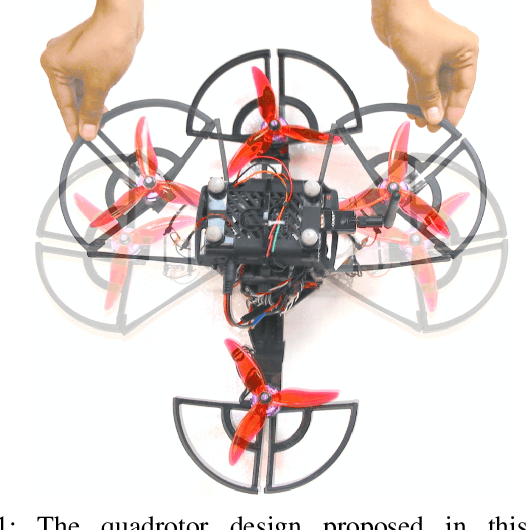
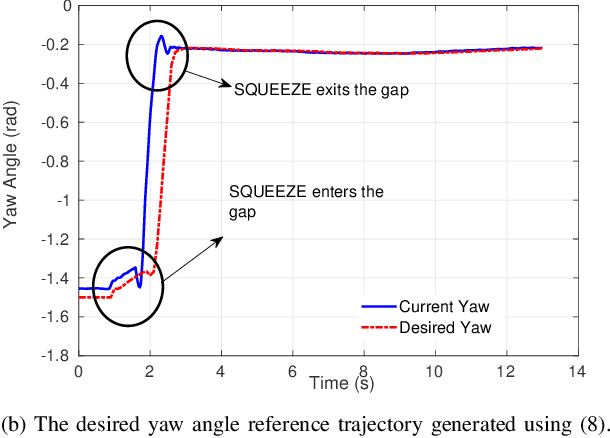
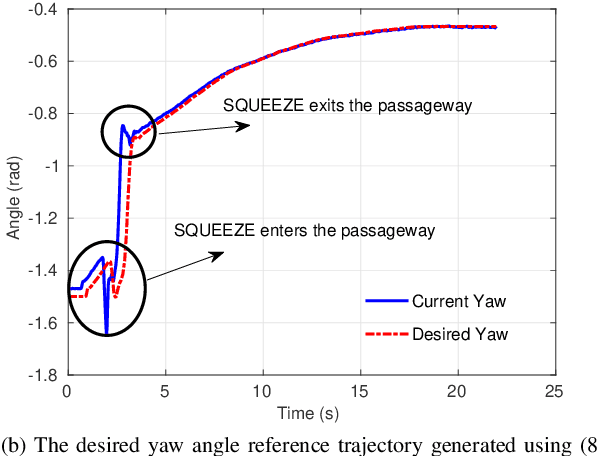

This paper presents the design and control of a novel quadrotor with a variable geometry to physically interact with cluttered environments and fly through narrow gaps and passageways. This compliant quadrotor with passive morphing capabilities is designed using torsional springs at every arm hinge to allow for rotation driven by external forces. We derive the dynamic model of this variable geometry quadrotor (SQUEEZE), and develop an adaptive controller for trajectory tracking. The corresponding Lyapunov stability proof of attitude tracking is also presented. Further, an admittance controller is designed to account for changes in yaw due to physical interactions with the environment. Finally, the proposed design is validated in flight tests with two setups: a small gap and a passageway. The experimental results demonstrate the unique capability of the SQUEEZE in navigating through constrained narrow spaces.