 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Area Coverage in Disaster Response Utilizing Autonomous UAV Swarm Formations
Dec 08, 2025This paper presents a UAV swarm system designed to assist first responders in disaster scenarios like wildfires. By distributing sensors across multiple agents, the system extends flight duration and enhances data availability, reducing the risk of mission failure due to collisions. To mitigate this risk further, we introduce an autonomous navigation framework that utilizes a local Euclidean Signed Distance Field (ESDF) map for obstacle avoidance while maintaining swarm formation with minimal path deviation. Additionally, we incorporate a Traveling Salesman Problem (TSP) variant to optimize area coverage, prioritizing Points of Interest (POIs) based on preassigned values derived from environmental behavior and critical infrastructure. The proposed system is validated through simulations with varying swarm sizes, demonstrating its ability to maximize coverage while ensuring collision avoidance between UAVs and obstacles.
A Soft-Bodied Aerial Robot for Collision Resilience and Contact-Reactive Perching
May 02, 2022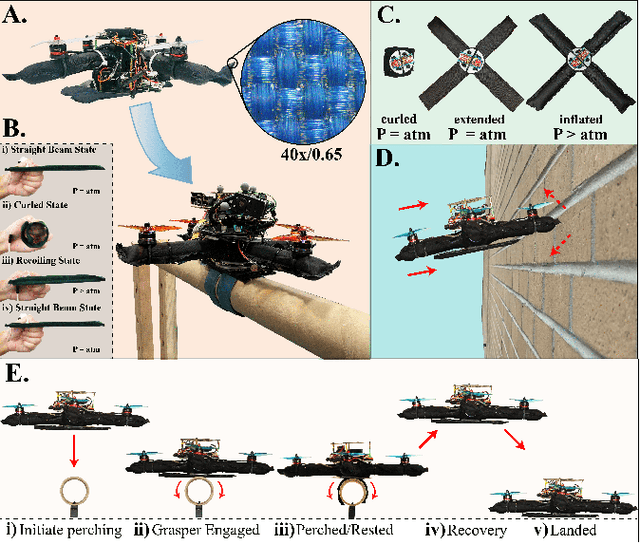
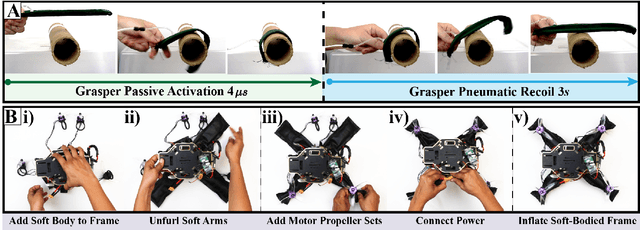
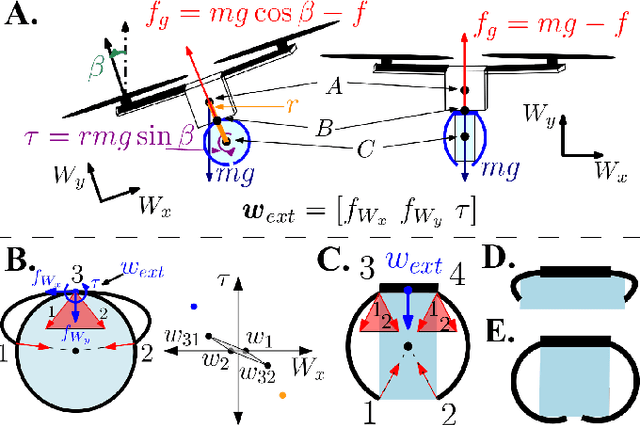
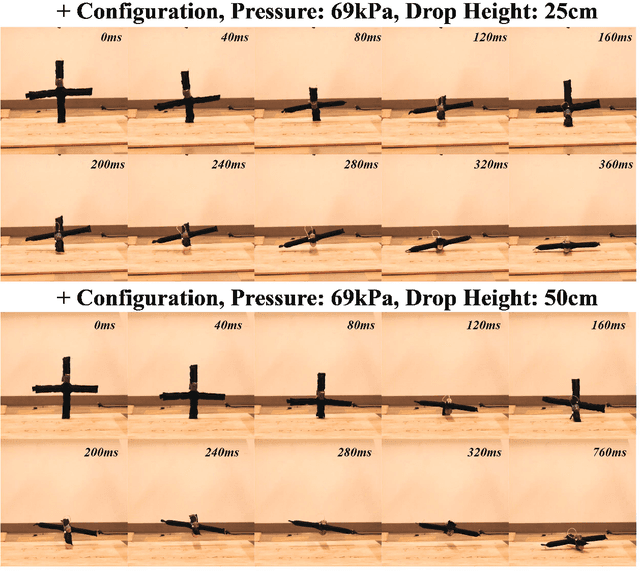
Compared to their biological counterparts, aerial robots demonstrate limited capabilities when tasked to interact in unstructured environments. Very often, the limitation lies in their inability to tolerate collisions and to successfully land, or perch, on objects of unknown shape. Over the past years, efforts to address this have introduced designs that incorporate mechanical impact protection and grasping/perching structures at the cost of reduced agility and flight time due to added weight and bulkiness. In this work, we develop a fabric-based, soft-bodied aerial robot (SoBAR) composed of both contact-reactive perching and embodied impact protection structures while remaining lightweight and streamlined. The robot is capable to 1) pneumatically vary its body stiffness for collision resilience and 2) utilize a hybrid fabric-based, bistable (HFB) grasper to perform passive grasping. When compared to conventional rigid drone frames the SoBAR successfully demonstrates its ability to dissipate impact from head-on collisions and maintain flight stability without any structural damage. Furthermore, in dynamic perching scenarios the HFB grasper is capable to convert impact energy upon contact into firm grasp through rapid body shape conforming in less than 4ms. We exhaustively study and offer insights for this novel perching scheme through grasping characterization, grasp wrench analysis, and experimental grasping validations in objects with various shapes. Finally, we demonstrate the complete control pipeline for SoBAR to approach an object, dynamically perch on it, recover from it, and land.
Fabric Soft Poly-Limbs for Physical Assistance of Daily Living Tasks
Mar 19, 2019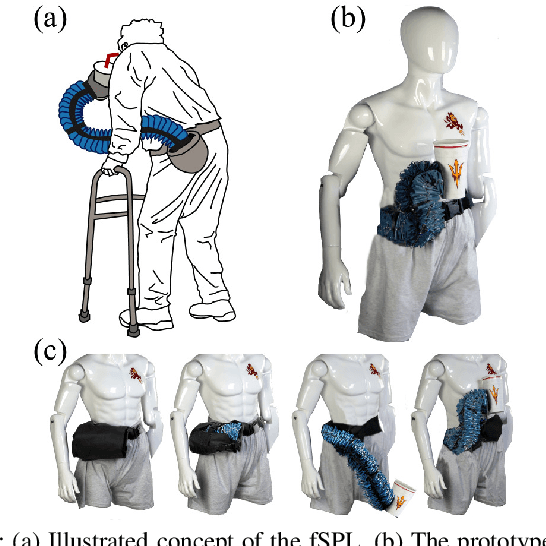


This paper presents the design and development of a highly articulated, continuum, wearable, fabric-based Soft Poly-Limb (fSPL). This fabric soft arm acts as an additional limb that provides the wearer with mobile manipulation assistance through the use of soft actuators made with high-strength inflatable fabrics. In this work, a set of systematic design rules is presented for the creation of highly compliant soft robotic limbs through an understanding of the fabric based components behavior as a function of input pressure. These design rules are generated by investigating a range of parameters through computational finite-element method (FEM) models focusing on the fSPL's articulation capabilities and payload capacity in 3D space. The theoretical motion and payload outputs of the fSPL and its components are experimentally validated as well as additional evaluations verify its capability to safely carry loads 10.1x its body weight, by wrapping around the object. Finally, we demonstrate how the fully collapsible fSPL can comfortably be stored in a soft-waist belt and interact with the wearer through spatial mobility and preliminary pick-and-place control experiments.