 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Soft-Bodied Aerial Robot for Collision Resilience and Contact-Reactive Perching
Paper and Code
May 02, 2022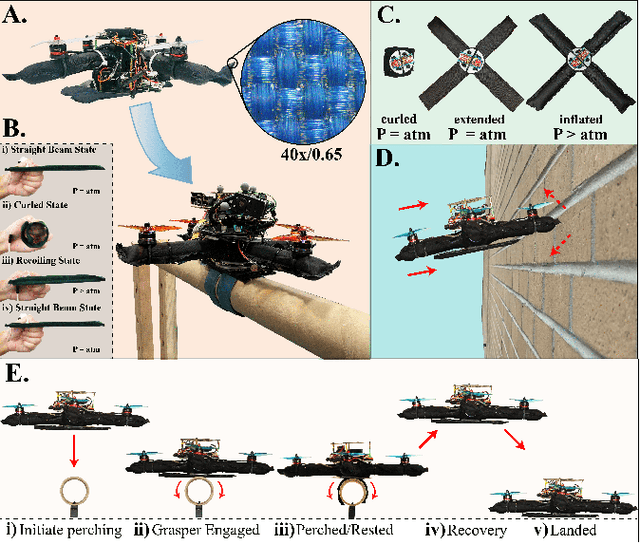
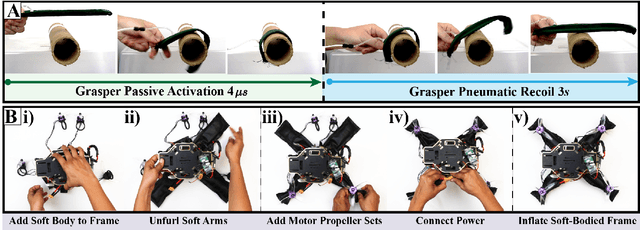
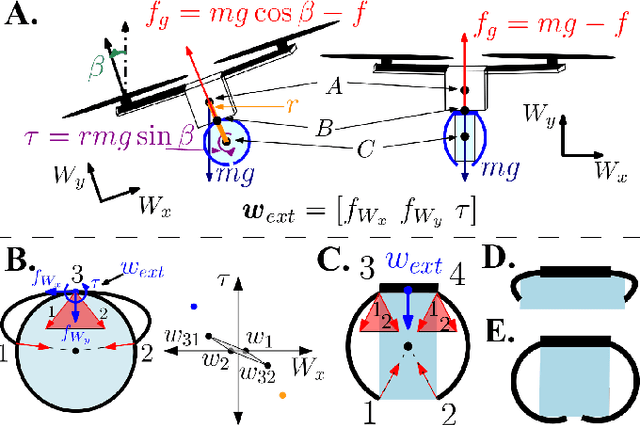
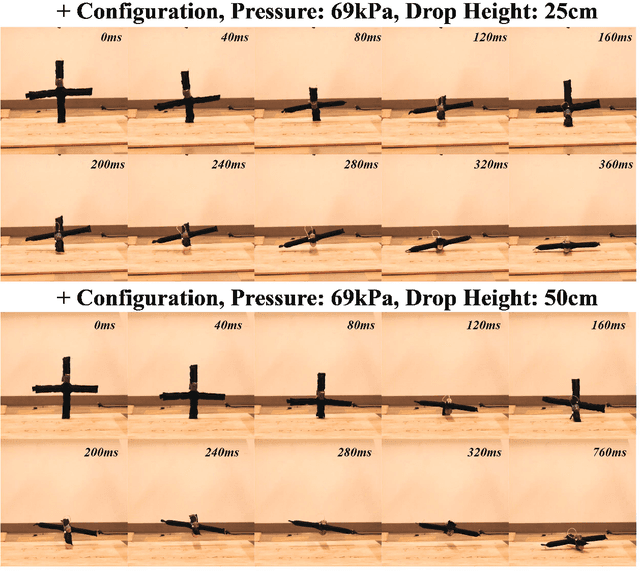
Compared to their biological counterparts, aerial robots demonstrate limited capabilities when tasked to interact in unstructured environments. Very often, the limitation lies in their inability to tolerate collisions and to successfully land, or perch, on objects of unknown shape. Over the past years, efforts to address this have introduced designs that incorporate mechanical impact protection and grasping/perching structures at the cost of reduced agility and flight time due to added weight and bulkiness. In this work, we develop a fabric-based, soft-bodied aerial robot (SoBAR) composed of both contact-reactive perching and embodied impact protection structures while remaining lightweight and streamlined. The robot is capable to 1) pneumatically vary its body stiffness for collision resilience and 2) utilize a hybrid fabric-based, bistable (HFB) grasper to perform passive grasping. When compared to conventional rigid drone frames the SoBAR successfully demonstrates its ability to dissipate impact from head-on collisions and maintain flight stability without any structural damage. Furthermore, in dynamic perching scenarios the HFB grasper is capable to convert impact energy upon contact into firm grasp through rapid body shape conforming in less than 4ms. We exhaustively study and offer insights for this novel perching scheme through grasping characterization, grasp wrench analysis, and experimental grasping validations in objects with various shapes. Finally, we demonstrate the complete control pipeline for SoBAR to approach an object, dynamically perch on it, recover from it, and land.