 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGrasping and Rolling In-plane Manipulation Using Deployable Tape spring Appendages
Nov 29, 2024Rigid multi-link robotic arms face a tradeoff between their overall reach distance (the workspace), and how compactly they can be collapsed (the storage volume). Increasing the workspace of a robot arm requires longer links, which adds weight to the system and requires a larger storage volume. However, the tradeoff between workspace and storage volume can be resolved by the use of deployable structures with high extensibility. In this work we introduce a bidirectional tape spring based structure that can be stored in a compact state and then extended to perform manipulation tasks, allowing for a large manipulation workspace and low storage volume. Bidirectional tape springs are demonstrated to have large buckling strength compared to single tape springs, while maintaining the ability to roll into a compact storage volume. Two tape spring structures are integrated into a bimanual manipulator robot called GRIP-tape that allows for object Grasping and Rolling In Planar configurations (GRIP). In demonstrations we show that the continuum kinematics of the tape springs enable novel manipulation capabilities such as simultaneous translation-rotation and multi-object conveyance. Furthermore, the dual mechanical properties of stiffness and softness in the tape springs enables inherent safety from unintended collisions within the workspace and soft-contact with objects. Our system demonstrates new opportunities for extensible manipulators that may benefit manipulation in remote environments such as space and the deep sea.
Fabric Soft Poly-Limbs for Physical Assistance of Daily Living Tasks
Mar 19, 2019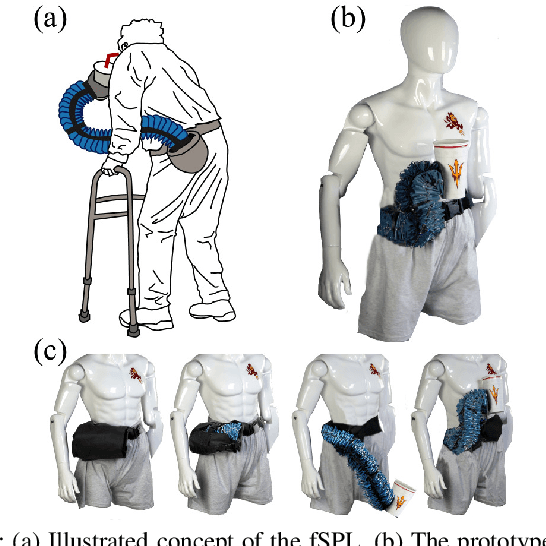

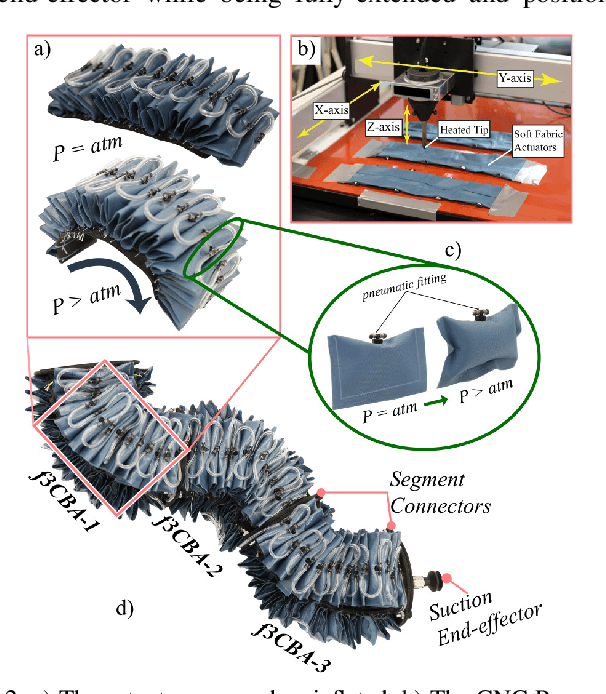

This paper presents the design and development of a highly articulated, continuum, wearable, fabric-based Soft Poly-Limb (fSPL). This fabric soft arm acts as an additional limb that provides the wearer with mobile manipulation assistance through the use of soft actuators made with high-strength inflatable fabrics. In this work, a set of systematic design rules is presented for the creation of highly compliant soft robotic limbs through an understanding of the fabric based components behavior as a function of input pressure. These design rules are generated by investigating a range of parameters through computational finite-element method (FEM) models focusing on the fSPL's articulation capabilities and payload capacity in 3D space. The theoretical motion and payload outputs of the fSPL and its components are experimentally validated as well as additional evaluations verify its capability to safely carry loads 10.1x its body weight, by wrapping around the object. Finally, we demonstrate how the fully collapsible fSPL can comfortably be stored in a soft-waist belt and interact with the wearer through spatial mobility and preliminary pick-and-place control experiments.