 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and Control of SQUEEZE: A Spring-augmented QUadrotor for intEractions with the Environment to squeeZE-and-fly
Paper and Code
Oct 24, 2020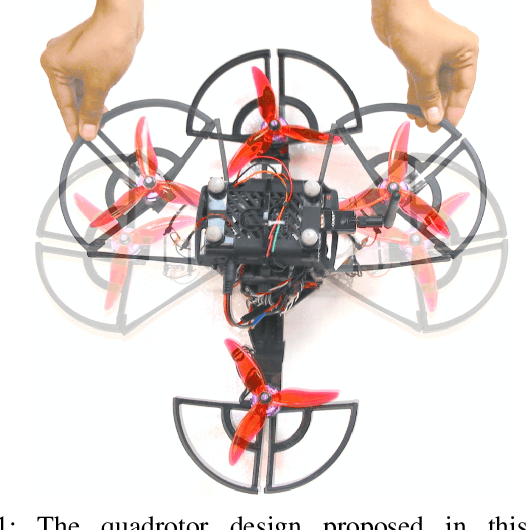
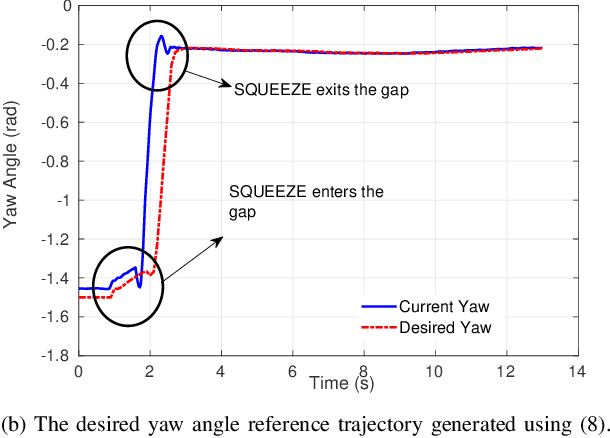
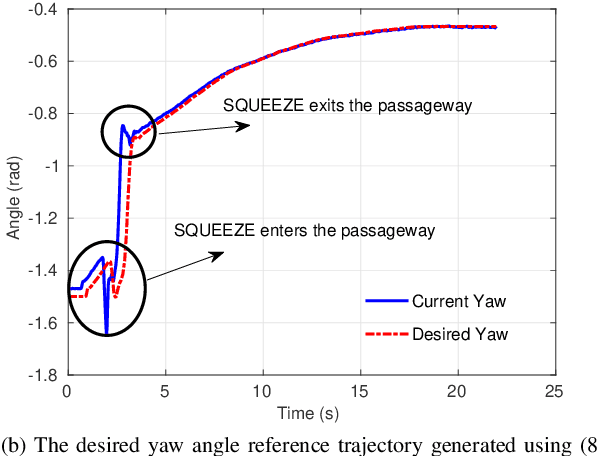

This paper presents the design and control of a novel quadrotor with a variable geometry to physically interact with cluttered environments and fly through narrow gaps and passageways. This compliant quadrotor with passive morphing capabilities is designed using torsional springs at every arm hinge to allow for rotation driven by external forces. We derive the dynamic model of this variable geometry quadrotor (SQUEEZE), and develop an adaptive controller for trajectory tracking. The corresponding Lyapunov stability proof of attitude tracking is also presented. Further, an admittance controller is designed to account for changes in yaw due to physical interactions with the environment. Finally, the proposed design is validated in flight tests with two setups: a small gap and a passageway. The experimental results demonstrate the unique capability of the SQUEEZE in navigating through constrained narrow spaces.