 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdaptive Attitude Control for Foldable Quadrotors
Paper and Code
Sep 18, 2022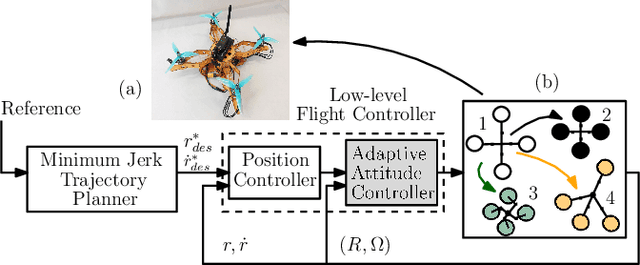
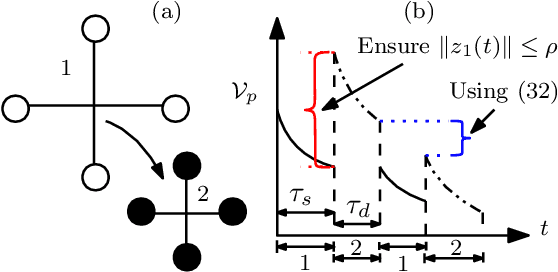
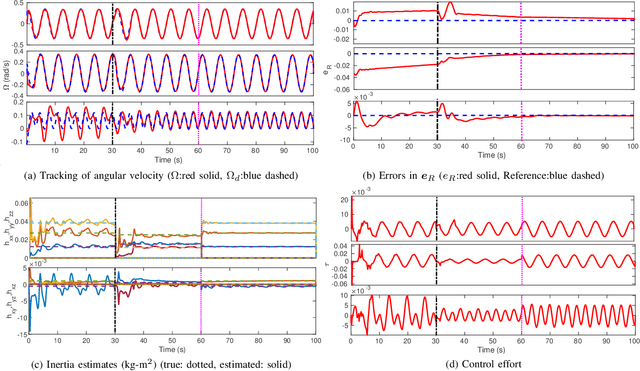
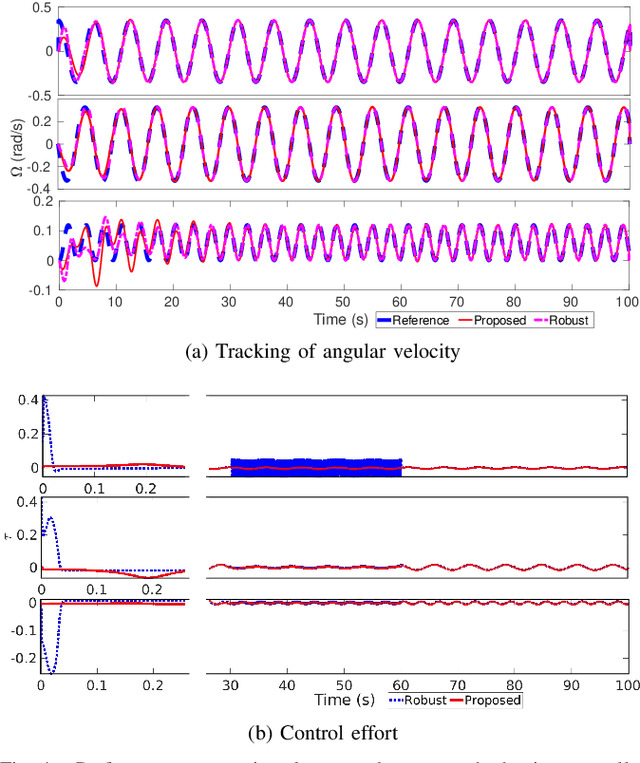
Recent quadrotor vehicles transcended conventional designs, emphasizing more on foldable and reconfigurable bodies. However, the state of the art still focuses on the mechanical feasibility of such designs with limited discussions on the tracking performance of the vehicle during configuration switching. In this paper, we propose a complete control and planning framework for attitude tracking during configuration switching and curbs any switch-based disturbances, which can lead to violation of safety constraints and cause crashes. The control framework includes a morphology-aware adaptive controller with a estimator to account for parameter variation and a minimum-jerk trajectory planner to achieve stable flights while switching. Stability analysis for attitude tracking is presented by employing the theory of switched systems and simulation results validate the proposed framework for a foldable quadrotor's flight through a passageway.