 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTethered Power Supply for Quadcopters: Architecture, Analysis and Experiments
Mar 15, 2022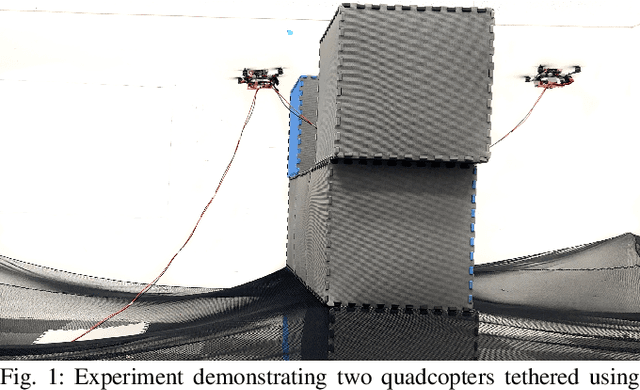
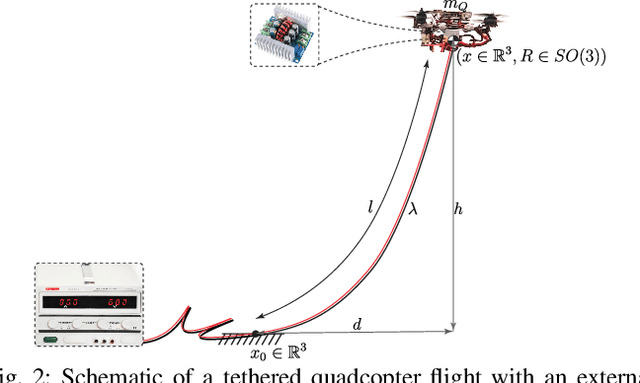

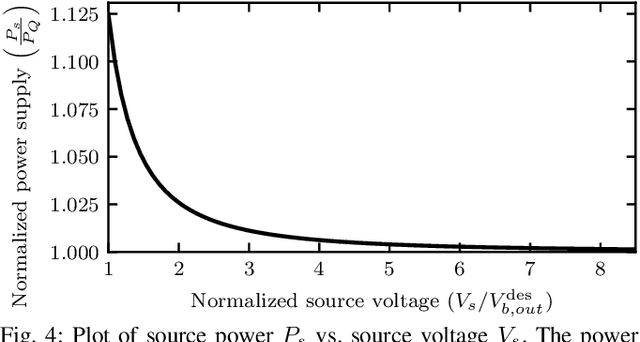
Tethered quadcopters are used for extended flight operations where the necessary power to the system is provided through the tether from an external power source on the ground. In this work, we study the design factors such as the tether mass, electrical resistance, voltage conversion efficiency, etc. that influence the power requirements. We present analytical formulations to predict the power requirement for a given setup. Additionally, we show the existence of a critical hover height for a single-quadcopter tether system, beyond which it is physically (electrically) impossible for the quadcopter to hover. We then present experimental results for single and two-quadcopter tethered systems. Power supply readings from the experiments in various configurations are consistent with the predictions from the analysis (within 5%), which experimentally validates the presented analysis. A two-quadcopter system powered via a single tether is flown through a corridor to demonstrate one of the applications of having multiple quadcopters on the same tether.
Docking two multirotors in midair using relative vision measurements
Nov 11, 2020


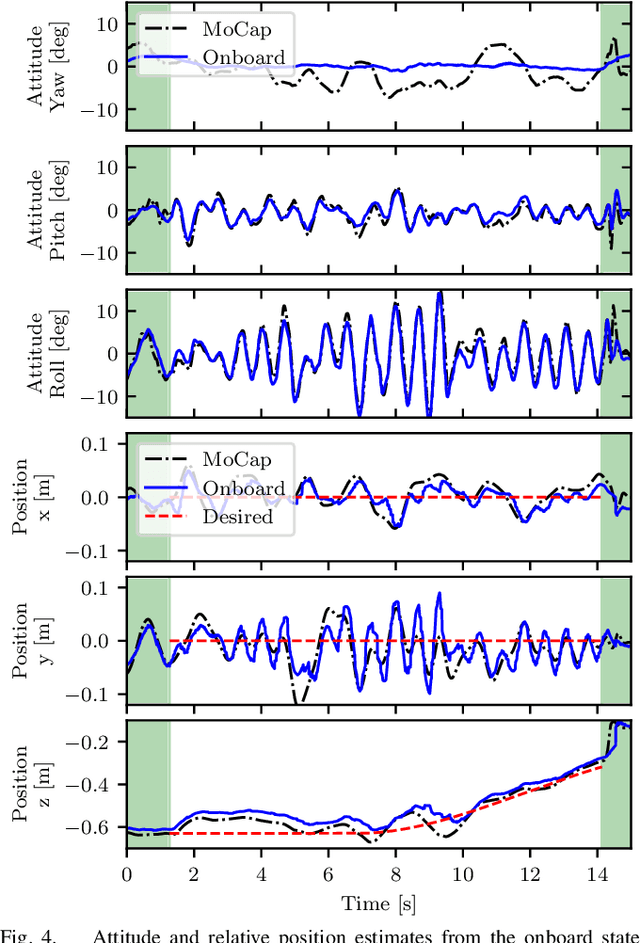
Modular robots have been rising in popularity for a variety of applications, and autonomous midair docking is a necessary task for real world deployment of these robots. We present a state estimator based on the extended Kalman filter for relative localization of one multirotor with respect to another using only onboard sensors, specifically an inertial measurement unit and a camera-marker pair. Acceleration and angular velocity measurements along with relative pose measurements from a camera on the first multirotor looking at a marker on the second multirotor are used to estimate the relative position and velocity of the first multirotor with respect to the second, and the absolute attitude of the first multirotor. We also present a control architecture to use these onboard state estimates to control the first multirotor at a desired setpoint with respect to the second. The performance of the estimator and control architecture are experimentally validated by successfully and repeatably performing midair docking -- a task that requires relative position precision on the order of a centimeter.
Staging energy sources to extend flight time of a multirotor UAV
Mar 09, 2020



Energy sources such as batteries do not decrease in mass after consumption, unlike combustion-based fuels. We present the concept of staging energy sources, i.e. consuming energy in stages and ejecting used stages, to progressively reduce the mass of aerial vehicles in-flight which reduces power consumption, and consequently increases flight time. A flight time vs. energy storage mass analysis is presented to show the endurance benefit for multirotors on staging. We consider two specific problems in discrete staging -- optimal order of staging given a certain number of energy sources, and optimal partitioning of a given energy storage mass budget into a given number of stages. We then derive results for two continuously staged cases -- an internal combustion engine driving propellers, and a rocket engine. A fundamental flight time limit is seen for the internal combustion engine case, but not for the rocket engine, suggesting that rocket engines could be a better choice in certain scenarios. Lastly, we conduct flight experiments on a custom two-stage battery-powered quadcopter. This quadcopter can eject a battery stage after consumption in-flight using a custom-designed mechanism, and continue hovering using the next stage. The experimental flight times are compared with those predicted from the analysis for our vehicle. The values match well which validates the presented staging analysis.
Flying batteries: In-flight battery switching to increase multirotor flight time
Sep 22, 2019



We present a novel approach to increase the flight time of a multirotor via mid-air docking and in-flight battery switching. A main quadcopter flying using a primary battery has a docking platform attached to it. A 'flying battery' - a small quadcopter carrying a secondary battery - is equipped with docking legs that can mate with the main quadcopter's platform. Connectors between the legs and the platform establish electrical contact on docking, and enable power transfer from the secondary battery to the main quadcopter. A custom-designed circuit allows arbitrary switching between the primary battery and secondary battery. We demonstrate the concept in a flight experiment involving repeated docking, battery switching, and undocking. The experiment increases the flight time of the main quadcopter by a factor of 4.7x compared to solo flight, and 2.2x a theoretical limit for that given multirotor. Importantly, this increase in flight time is not associated with a large increase in overall vehicle mass or size, leaving the main quadcopter in fundamentally the same safety class.
Predictive Control for Chasing a Ground Vehicle using a UAV
May 22, 2019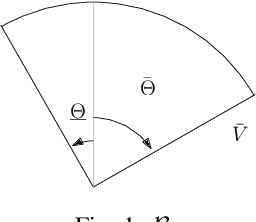

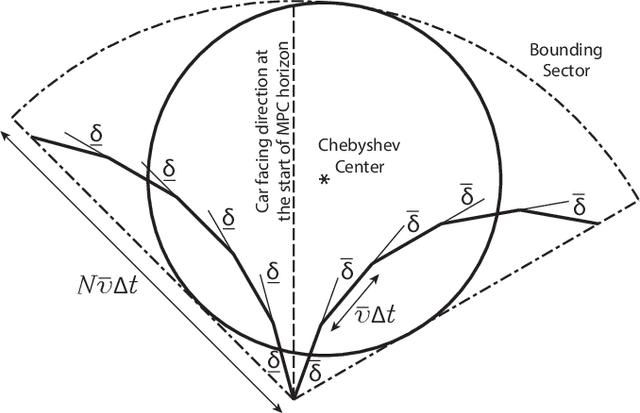
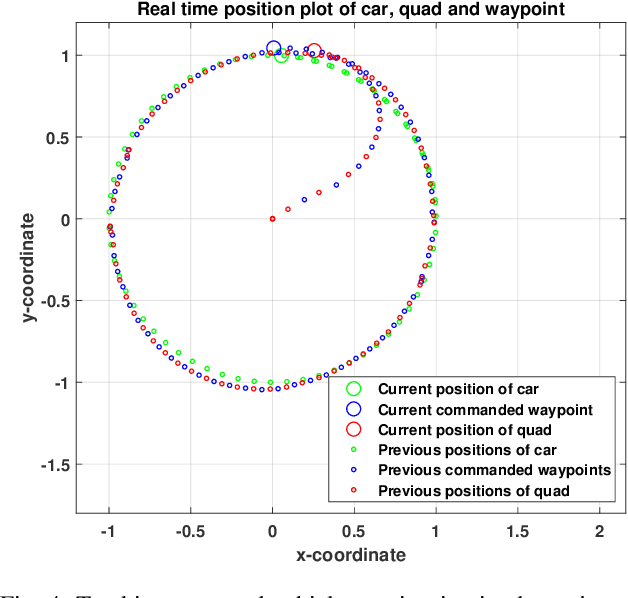
We propose a high-level planner for a multirotor to chase a ground vehicle, while simultaneously respecting various state and input constraints. Assuming a minimal kinematic model for the ground vehicle, we use data collected online to generate predictions for our planner within a model predictive control framework. Our solution is demonstrated, both via simulations and experiments on a stable quadcopter platform.