 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTethered Power Supply for Quadcopters: Architecture, Analysis and Experiments
Mar 15, 2022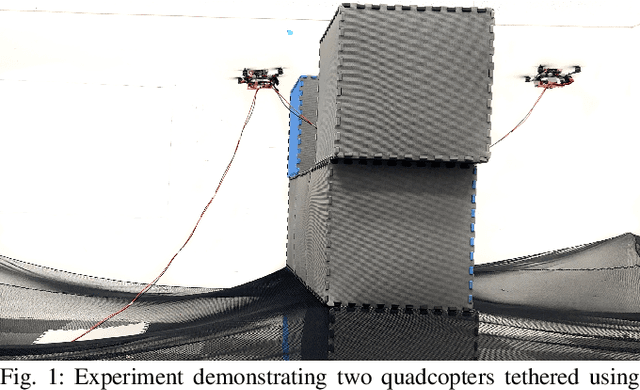
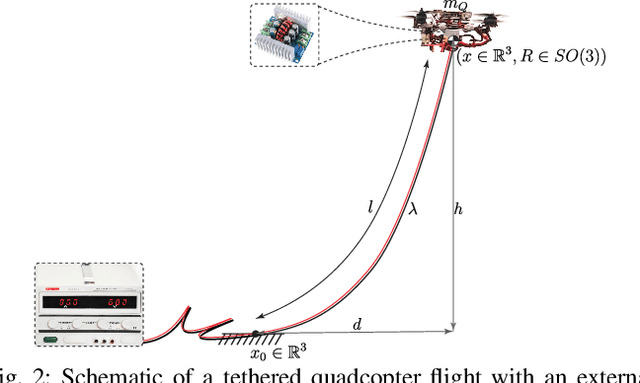

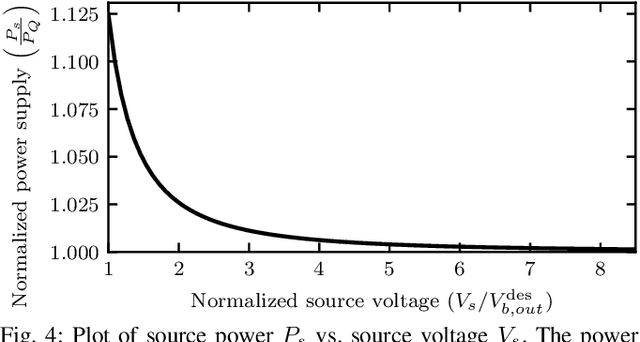
Tethered quadcopters are used for extended flight operations where the necessary power to the system is provided through the tether from an external power source on the ground. In this work, we study the design factors such as the tether mass, electrical resistance, voltage conversion efficiency, etc. that influence the power requirements. We present analytical formulations to predict the power requirement for a given setup. Additionally, we show the existence of a critical hover height for a single-quadcopter tether system, beyond which it is physically (electrically) impossible for the quadcopter to hover. We then present experimental results for single and two-quadcopter tethered systems. Power supply readings from the experiments in various configurations are consistent with the predictions from the analysis (within 5%), which experimentally validates the presented analysis. A two-quadcopter system powered via a single tether is flown through a corridor to demonstrate one of the applications of having multiple quadcopters on the same tether.
Multiple quadrotors carrying a flexible hose: dynamics, differential flatness and control
Nov 28, 2019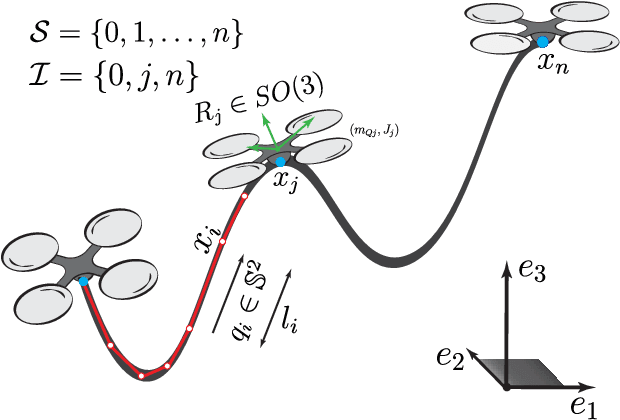
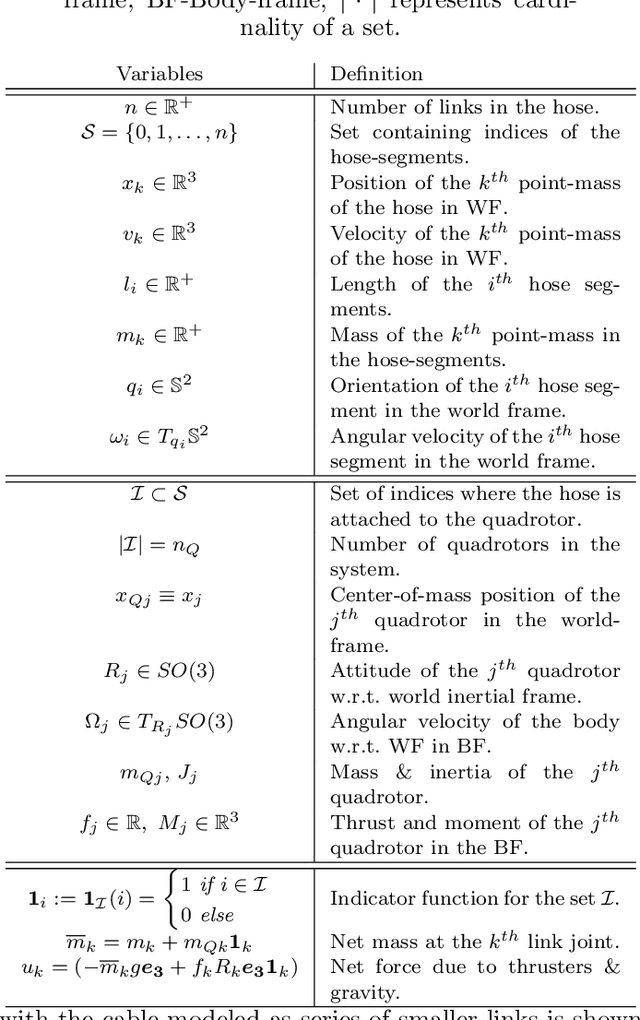
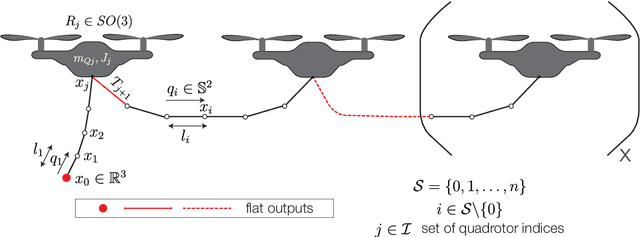
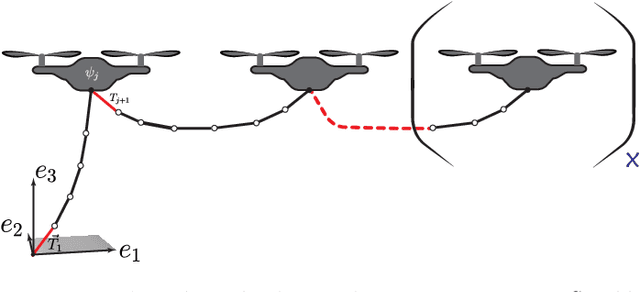
Using quadrotors UAVs for cooperative payload transportation using cables has been actively gaining interest in recent years. Understanding the dynamics of these complex multi-agent systems would help towards designing safe and reliable systems. In this work, we study one such multi-agent system comprising of multiple quadrotors transporting a flexible hose. We model the hose as a series of smaller discrete links and derive a generalized coordinate-free dynamics for the same. We show that certain configurations of this under-actuated system are differentially-flat. We linearize the dynamics using variation-based linearization and present a linear time-varying LQR to track desired trajectories. Finally, we present numerical simulations to validate the dynamics, flatness, and control.