 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesign and control of a collision-resilient aerial vehicle with an icosahedron tensegrity structure
Nov 22, 2022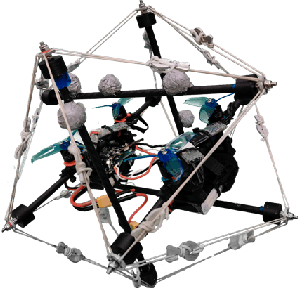
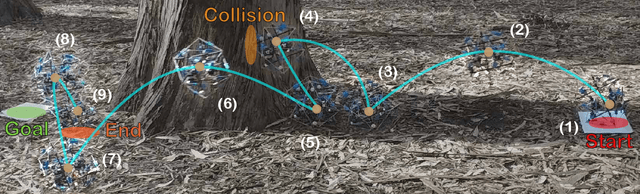
We present the tensegrity aerial vehicle, a design of collision-resilient rotor robots with icosahedron tensegrity structures. The tensegrity aerial vehicles can withstand high-speed impacts and resume operation after collisions. To guide the design process of these aerial vehicles, we propose a model-based methodology that predicts the stresses in the structure with a dynamics simulation and selects components that can withstand the predicted stresses. Meanwhile, an autonomous re-orientation controller is created to help the tensegrity aerial vehicles resume flight after collisions. The re-orientation controller can rotate the vehicles from arbitrary orientations on the ground to ones easy for takeoff. With collision resilience and re-orientation ability, the tensegrity aerial vehicles can operate in cluttered environments without complex collision-avoidance strategies. Moreover, by adopting an inertial navigation strategy of replacing flight with short hops to mitigate the growth of state estimation error, the tensegrity aerial vehicles can conduct short-range operations without external sensors. These capabilities are validated by a test of an experimental tensegrity aerial vehicle operating with only onboard inertial sensors in a previously-unknown forest.
Exploiting collisions for sampling-based multicopter motion planning
Nov 08, 2020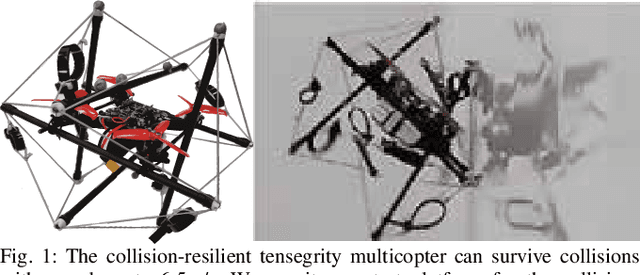
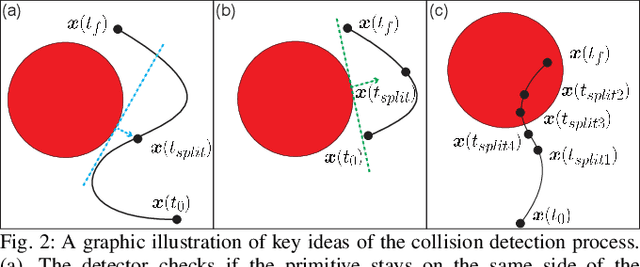
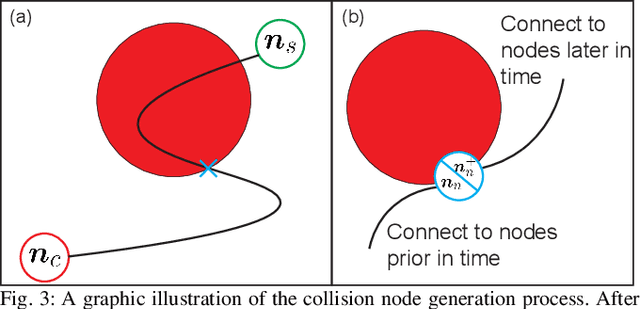
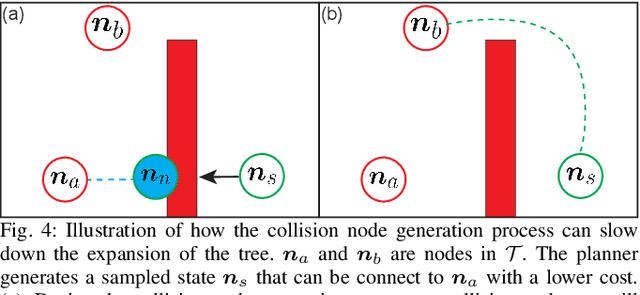
Multicopters with collision-resilient designs can operate with trajectories involving collisions. This paper presents a sampling-based method that can exploit collisions for better motion planning. The method is built upon the basis of the RRT* algorithm and takes advantages of fast motion primitive generation and collision checking for multicopters. It generates collision states by detecting potential intersections between motion primitives and obstacles, and connects these states with other sampled states to form collision-inclusive trajectories. We show that allowing collision helps improve the performance of the sampling-based planner in narrow spaces like tunnels. Finally, an experiment of tracking the trajectory generated by the collision-inclusive planner is presented.
A collision-resilient aerial vehicle with icosahedron tensegrity structure
Mar 06, 2020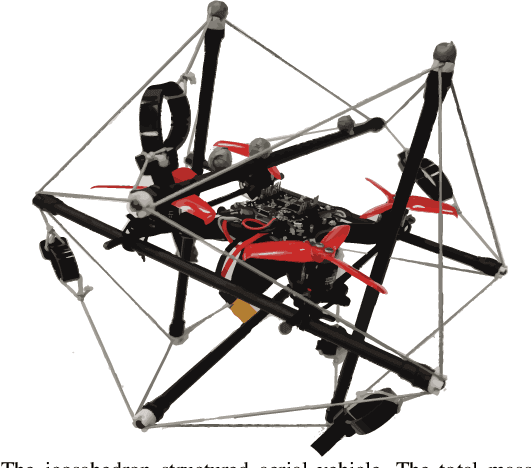
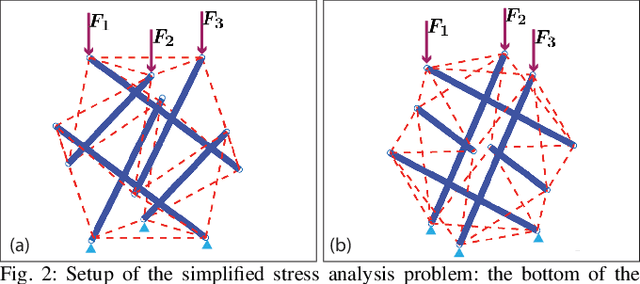
Aerial vehicles with collision resilience can operate with more confidence in environments with obstacles that are hard to detect and avoid. This paper presents the methodology used to design a collision resilient aerial vehicle with icosahedron tensegrity structure. A simplified stress analysis of the tensegrity frame under impact forces is performed to guide the selection of its components. In addition, an autonomous controller is presented to reorient the vehicle from an arbitrary orientation on the ground to help it take off. Experiments show that the vehicle can successfully reorient itself after landing upside-down and can survive collisions with speed up to 6.5m/s.
Predictive Control for Chasing a Ground Vehicle using a UAV
May 22, 2019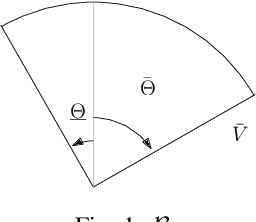

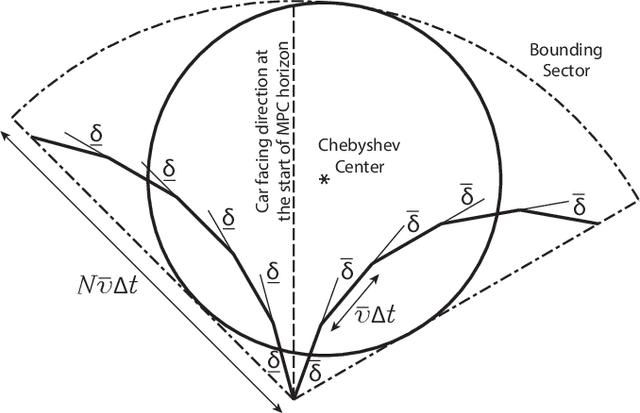
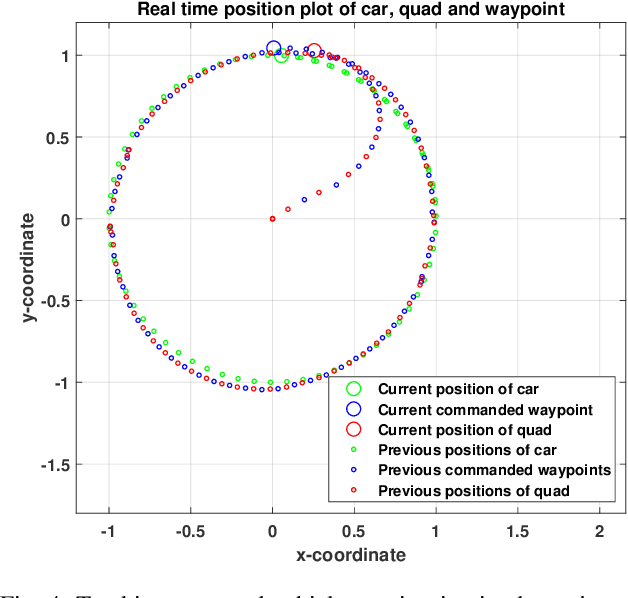
We propose a high-level planner for a multirotor to chase a ground vehicle, while simultaneously respecting various state and input constraints. Assuming a minimal kinematic model for the ground vehicle, we use data collected online to generate predictions for our planner within a model predictive control framework. Our solution is demonstrated, both via simulations and experiments on a stable quadcopter platform.