Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA collision-resilient aerial vehicle with icosahedron tensegrity structure
Mar 06, 2020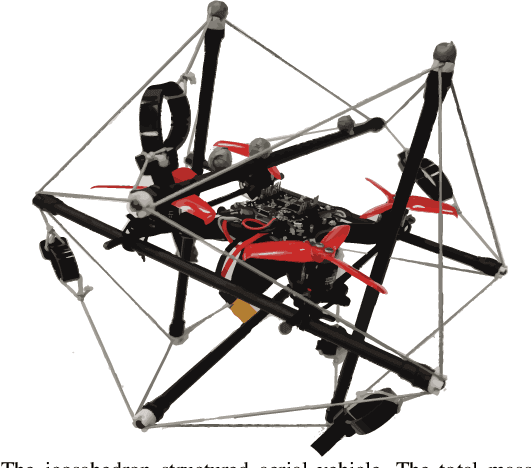
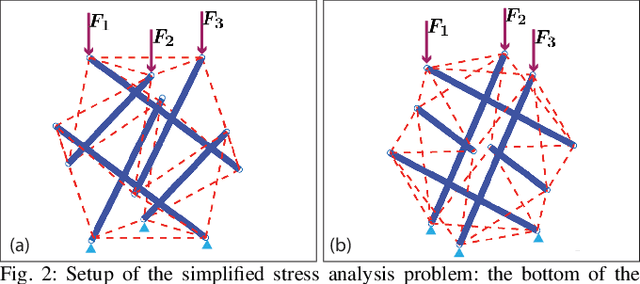
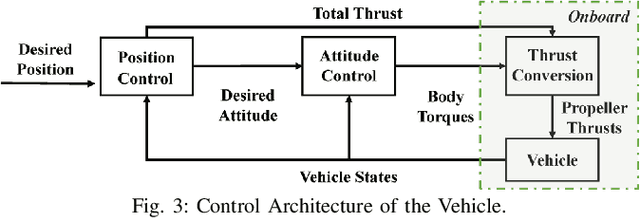
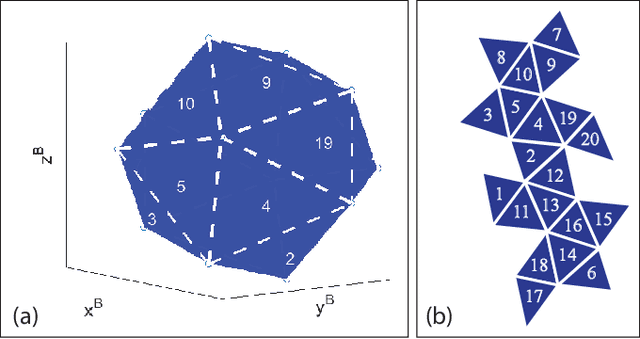
Aerial vehicles with collision resilience can operate with more confidence in environments with obstacles that are hard to detect and avoid. This paper presents the methodology used to design a collision resilient aerial vehicle with icosahedron tensegrity structure. A simplified stress analysis of the tensegrity frame under impact forces is performed to guide the selection of its components. In addition, an autonomous controller is presented to reorient the vehicle from an arbitrary orientation on the ground to help it take off. Experiments show that the vehicle can successfully reorient itself after landing upside-down and can survive collisions with speed up to 6.5m/s.
Via