 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Critical and Moving-Forward View on Quantum Image Processing
Jun 15, 2020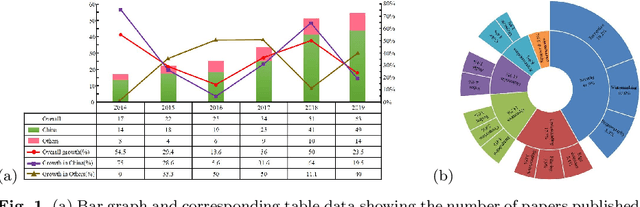
Physics and computer science have a long tradition of cross-fertilization. One of the latest outcomes of this mutually beneficial relationship is quantum information science, which comprises the study of information processing tasks that can be accomplished using quantum mechanical systems. Quantum Image Processing (QIMP) is an emergent field of quantum information science whose main goal is to strengthen our capacity for storing, processing, and retrieving visual information from images and video either by transitioning from digital to quantum paradigms or by complementing digital imaging with quantum techniques. The expectation is that harnessing the properties of quantum mechanical systems in QIMP will result in the realization of advanced technologies that will outperform, enhance or complement existing and upcoming digital technologies for image and video processing tasks.
Time Hopping technique for faster reinforcement learning in simulations
Sep 06, 2011



This preprint has been withdrawn by the author for revision
Intent expression using eye robot for mascot robot system
Apr 10, 2009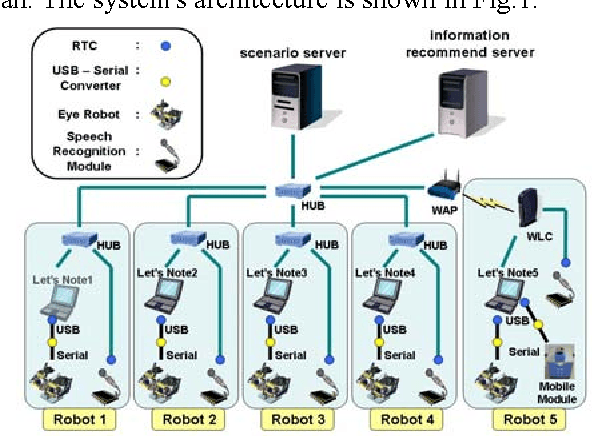
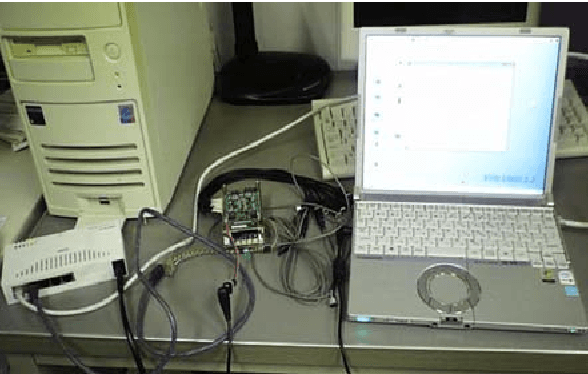
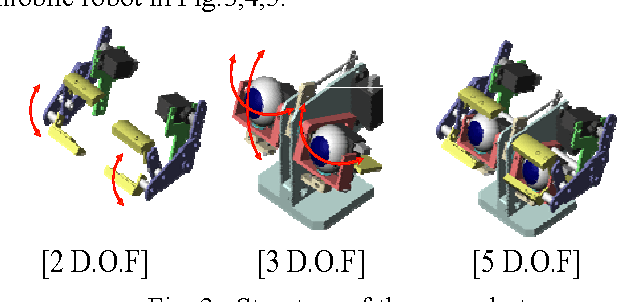
An intent expression system using eye robots is proposed for a mascot robot system from a viewpoint of humatronics. The eye robot aims at providing a basic interface method for an information terminal robot system. To achieve better understanding of the displayed information, the importance and the degree of certainty of the information should be communicated along with the main content. The proposed intent expression system aims at conveying this additional information using the eye robot system. Eye motions are represented as the states in a pleasure-arousal space model. Changes in the model state are calculated by fuzzy inference according to the importance and degree of certainty of the displayed information. These changes influence the arousal-sleep coordinates in the space that corresponds to levels of liveliness during communication. The eye robot provides a basic interface for the mascot robot system that is easy to be understood as an information terminal for home environments in a humatronics society.
* 5 pages
Fuzzy inference based mentality estimation for eye robot agent
Apr 10, 2009Household robots need to communicate with human beings in a friendly fashion. To achieve better understanding of displayed information, an importance and a certainty of the information should be communicated together with the main information. The proposed intent expression system aims to convey this additional information using an eye robot. The eye motions are represented as states in a pleasure-arousal space model. Change of the model state is calculated by fuzzy inference according to the importance and certainty of the displayed information. This change influences the arousal-sleep coordinate in the space which corresponds to activeness in communication. The eye robot provides a basic interface for the mascot robot system which is an easy to understand information terminal for home environments in a humatronics society.
* 2 pages, in Japanese
Eligibility Propagation to Speed up Time Hopping for Reinforcement Learning
Apr 03, 2009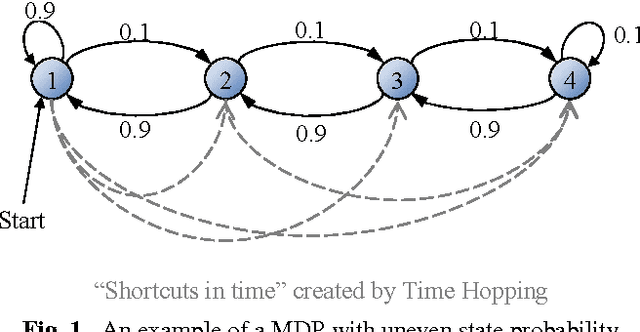
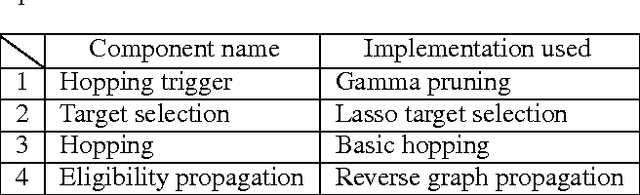
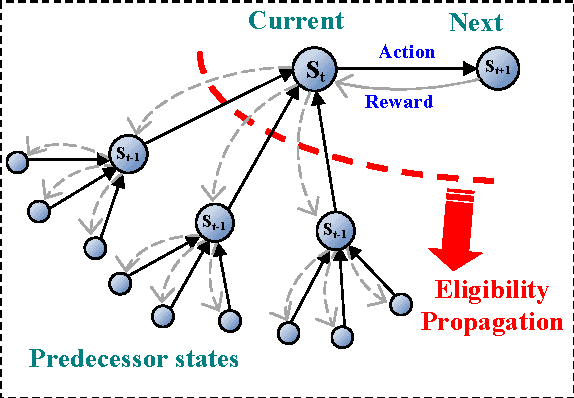
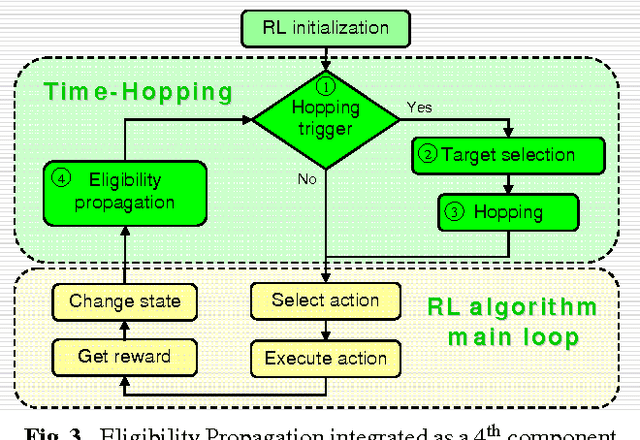
A mechanism called Eligibility Propagation is proposed to speed up the Time Hopping technique used for faster Reinforcement Learning in simulations. Eligibility Propagation provides for Time Hopping similar abilities to what eligibility traces provide for conventional Reinforcement Learning. It propagates values from one state to all of its temporal predecessors using a state transitions graph. Experiments on a simulated biped crawling robot confirm that Eligibility Propagation accelerates the learning process more than 3 times.
Time manipulation technique for speeding up reinforcement learning in simulations
Mar 28, 2009
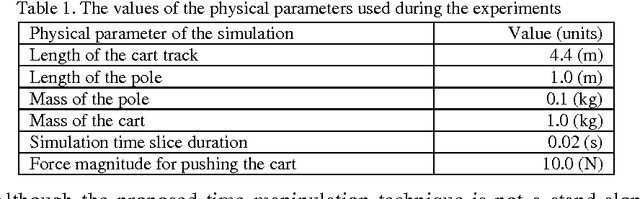
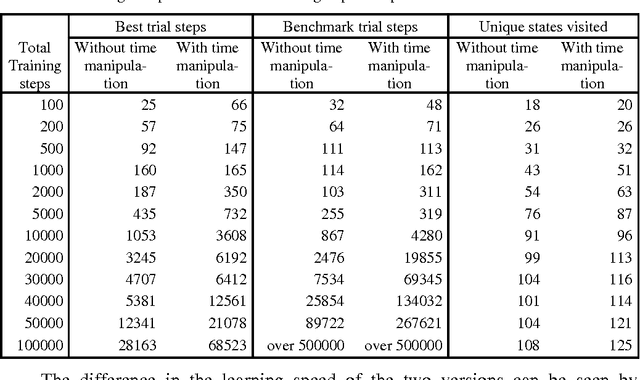
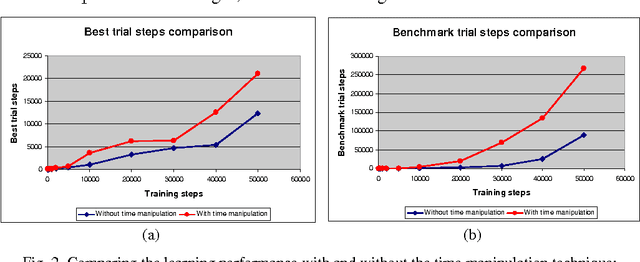
A technique for speeding up reinforcement learning algorithms by using time manipulation is proposed. It is applicable to failure-avoidance control problems running in a computer simulation. Turning the time of the simulation backwards on failure events is shown to speed up the learning by 260% and improve the state space exploration by 12% on the cart-pole balancing task, compared to the conventional Q-learning and Actor-Critic algorithms.
* 12 pages