Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEligibility Propagation to Speed up Time Hopping for Reinforcement Learning
Paper and Code
Apr 03, 2009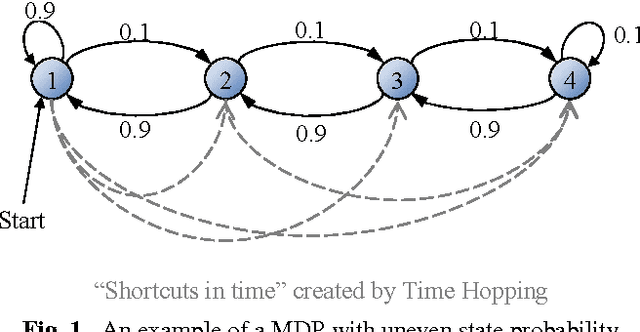
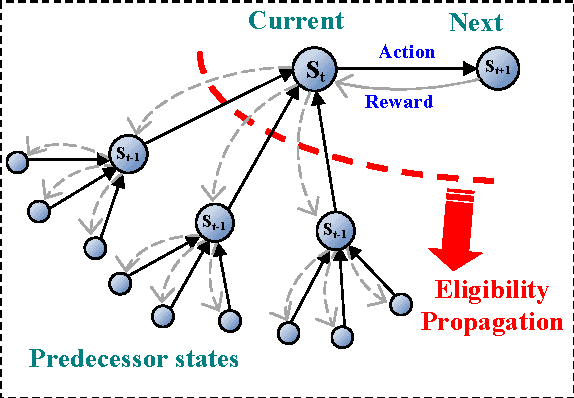
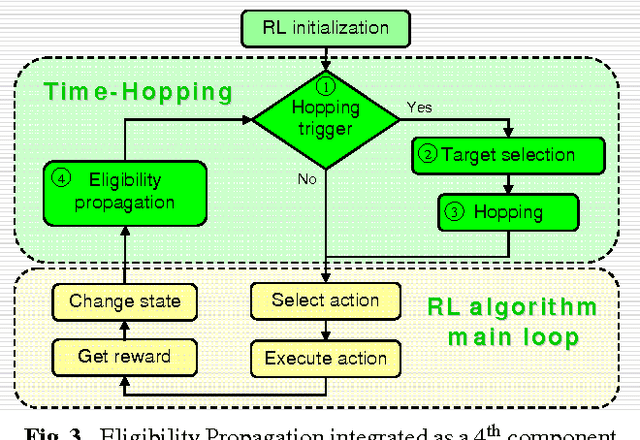
A mechanism called Eligibility Propagation is proposed to speed up the Time Hopping technique used for faster Reinforcement Learning in simulations. Eligibility Propagation provides for Time Hopping similar abilities to what eligibility traces provide for conventional Reinforcement Learning. It propagates values from one state to all of its temporal predecessors using a state transitions graph. Experiments on a simulated biped crawling robot confirm that Eligibility Propagation accelerates the learning process more than 3 times.
* 7 pages
View paper on