 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeInteraction in Remote Peddling Using Avatar Robot by People with Disabilities
Dec 02, 2022

Telework "avatar work," in which people with disabilities can engage in physical work such as customer service, is being implemented in society. In order to enable avatar work in a variety of occupations, we propose a mobile sales system using a mobile frozen drink machine and an avatar robot "OriHime", focusing on mobile customer service like peddling. The effect of the peddling by the system on the customers are examined based on the results of video annotation.
Frailty Care Robot for Elderly and Its Application for Physical and Psychological Support
Nov 20, 2021
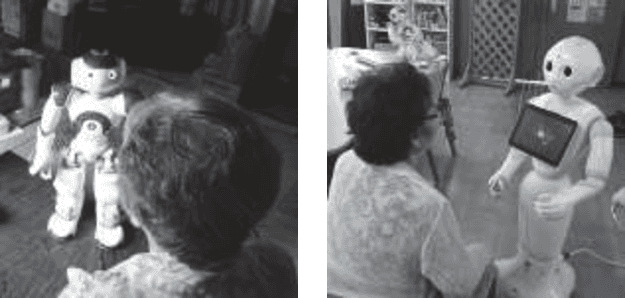
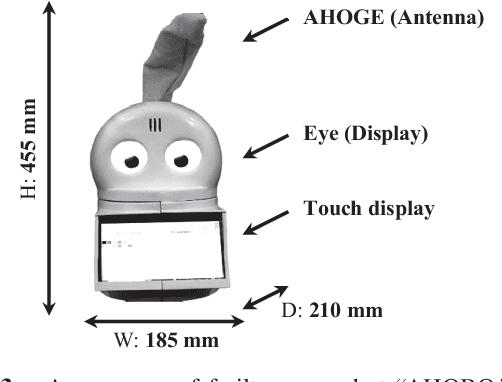
To achieve continuous frail care in the daily lives of the elderly, we propose AHOBO, a frail care robot for the elderly at home. Two types of support systems by AHOBO were implemented to support the elderly in both physical health and psychological aspects. For physical health frailty care, we focused on blood pressure and developed a support system for blood pressure measurement with AHOBO. For psychological frailty care, we implemented reminiscent coloring with the AHOBO as a recreational activity with the robot. The usability of the system was evaluated based on the assumption of continuous use in daily life. For the support system in blood pressure measurement, we performed a qualitative evaluation using a questionnaire for 16 subjects, including elderly people under blood pressure measurement by the system. The results confirmed that the proposed robot does not affect the blood pressure readings and is acceptable in terms of ease of use based on subjective evaluation. For the reminiscent coloring interaction, a subjective evaluation was conducted on two elderly people under the verbal fluency task, and it has been confirmed that the interaction can be used continuously in daily life. The widespread use of the proposed robot as an interface for AI that supports daily life will lead to a society in which AI robots support people from the cradle to the grave.
* 9 pages, 15 figures, J. Adv. Comput. Intell. Intell. Inform.(JACIII)
Avatar Work: Telework for Disabled People Unable to Go Outside by Using Avatar Robots "OriHime-D" and Its Verification
Mar 25, 2020



In this study, we propose a telework "avatar work" that enables people with disabilities to engage in physical works such as customer service in order to realize an inclusive society, where we can do anything if we have free mind, even though we are bedridden. In avatar work, disabled people can remotely engage in physical work by operating a proposed robot "OriHime-D" with a mouse or gaze input depending on their own disabilities. As a social implementation initiative of avatar work, we have opened a two-week limited avatar robot cafe and have evaluated remote employment by people with disabilities using OriHime-D. As the results by 10 people with disabilities, we have confirmed that the proposed avatar work leads to mental fulfillment for people with disparities, and can be designed with adaptable workload. In addition, we have confirmed that the work content of the experimental cafe is appropriate for people with a variety of disabilities seeking social participation. This study contributes to fulfillment all through life and lifetime working, and at the same time leads to a solution to the employment shortage problem.
* 8 pages, 16 figures, accepted to the 2020 ACM/IEEE International Conference on Human-Robot Interaction (HRI '20 Companion) at alt.HRI session, 2020
Intent expression using eye robot for mascot robot system
Apr 10, 2009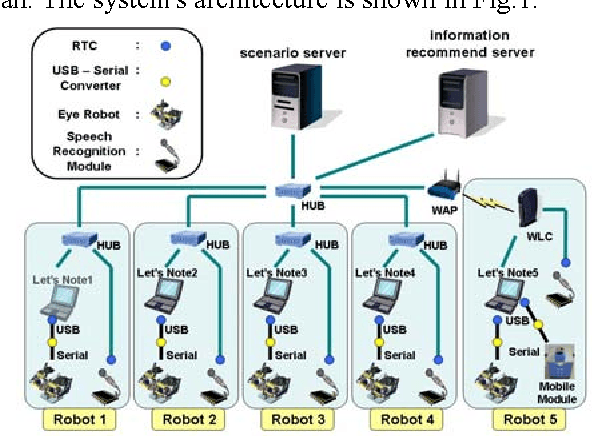
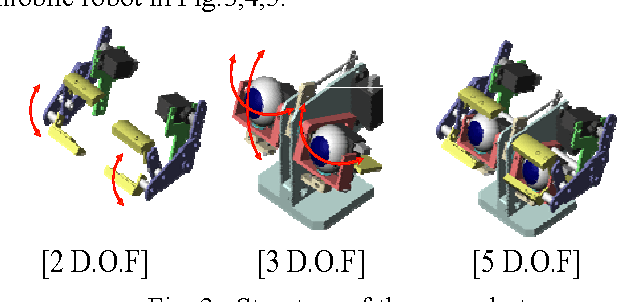
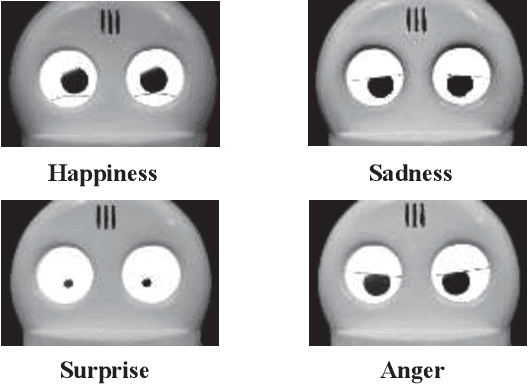
An intent expression system using eye robots is proposed for a mascot robot system from a viewpoint of humatronics. The eye robot aims at providing a basic interface method for an information terminal robot system. To achieve better understanding of the displayed information, the importance and the degree of certainty of the information should be communicated along with the main content. The proposed intent expression system aims at conveying this additional information using the eye robot system. Eye motions are represented as the states in a pleasure-arousal space model. Changes in the model state are calculated by fuzzy inference according to the importance and degree of certainty of the displayed information. These changes influence the arousal-sleep coordinates in the space that corresponds to levels of liveliness during communication. The eye robot provides a basic interface for the mascot robot system that is easy to be understood as an information terminal for home environments in a humatronics society.
* 5 pages
Fuzzy inference based mentality estimation for eye robot agent
Apr 10, 2009Household robots need to communicate with human beings in a friendly fashion. To achieve better understanding of displayed information, an importance and a certainty of the information should be communicated together with the main information. The proposed intent expression system aims to convey this additional information using an eye robot. The eye motions are represented as states in a pleasure-arousal space model. Change of the model state is calculated by fuzzy inference according to the importance and certainty of the displayed information. This change influences the arousal-sleep coordinate in the space which corresponds to activeness in communication. The eye robot provides a basic interface for the mascot robot system which is an easy to understand information terminal for home environments in a humatronics society.
* 2 pages, in Japanese