 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeUniPCGC: Towards Practical Point Cloud Geometry Compression via an Efficient Unified Approach
Mar 24, 2025Learning-based point cloud compression methods have made significant progress in terms of performance. However, these methods still encounter challenges including high complexity, limited compression modes, and a lack of support for variable rate, which restrict the practical application of these methods. In order to promote the development of practical point cloud compression, we propose an efficient unified point cloud geometry compression framework, dubbed as UniPCGC. It is a lightweight framework that supports lossy compression, lossless compression, variable rate and variable complexity. First, we introduce the Uneven 8-Stage Lossless Coder (UELC) in the lossless mode, which allocates more computational complexity to groups with higher coding difficulty, and merges groups with lower coding difficulty. Second, Variable Rate and Complexity Module (VRCM) is achieved in the lossy mode through joint adoption of a rate modulation module and dynamic sparse convolution. Finally, through the dynamic combination of UELC and VRCM, we achieve lossy compression, lossless compression, variable rate and complexity within a unified framework. Compared to the previous state-of-the-art method, our method achieves a compression ratio (CR) gain of 8.1\% on lossless compression, and a Bjontegaard Delta Rate (BD-Rate) gain of 14.02\% on lossy compression, while also supporting variable rate and variable complexity.
Accurate 3D Localization for MAV Swarms by UWB and IMU Fusion
Jul 28, 2018

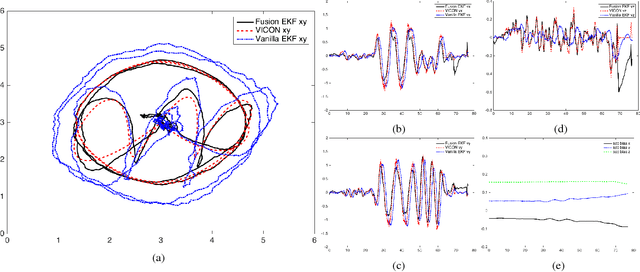
Driven by applications like Micro Aerial Vehicles (MAVs), driver-less cars, etc, localization solution has become an active research topic in the past decade. In recent years, Ultra Wideband (UWB) emerged as a promising technology because of its impressive performance in both indoor and outdoor positioning. But algorithms relying only on UWB sensor usually result in high latency and low bandwidth, which is undesirable in some situations such as controlling a MAV. To alleviate this problem, an Extended Kalman Filter (EKF) based algorithm is proposed to fuse the Inertial Measurement Unit (IMU) and UWB, which achieved 80Hz 3D localization with significantly improved accuracy and almost no delay. To verify the effectiveness and reliability of the proposed approach, a swarm of 6 MAVs is set up to perform a light show in an indoor exhibition hall. Video and source codes are available at https://github.com/lijx10/uwb-localization