 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDiscrete Rotation Equivariance for Point Cloud Recognition
Mar 31, 2019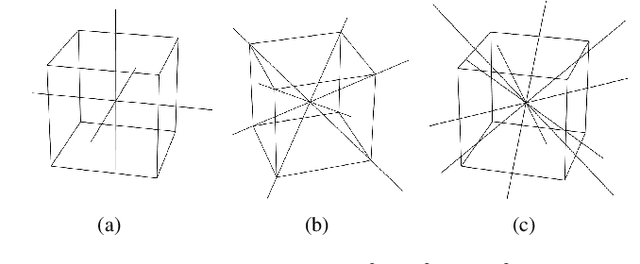



Despite the recent active research on processing point clouds with deep networks, few attention has been on the sensitivity of the networks to rotations. In this paper, we propose a deep learning architecture that achieves discrete $\mathbf{SO}(2)$/$\mathbf{SO}(3)$ rotation equivariance for point cloud recognition. Specifically, the rotation of an input point cloud with elements of a rotation group is similar to shuffling the feature vectors generated by our approach. The equivariance is easily reduced to invariance by eliminating the permutation with operations such as maximum or average. Our method can be directly applied to any existing point cloud based networks, resulting in significant improvements in their performance for rotated inputs. We show state-of-the-art results in the classification tasks with various datasets under both $\mathbf{SO}(2)$ and $\mathbf{SO}(3)$ rotations. In addition, we further analyze the necessary conditions of applying our approach to PointNet based networks. Source codes at https://github.com/lijx10/rot-equ-net
Accurate 3D Localization for MAV Swarms by UWB and IMU Fusion
Jul 28, 2018

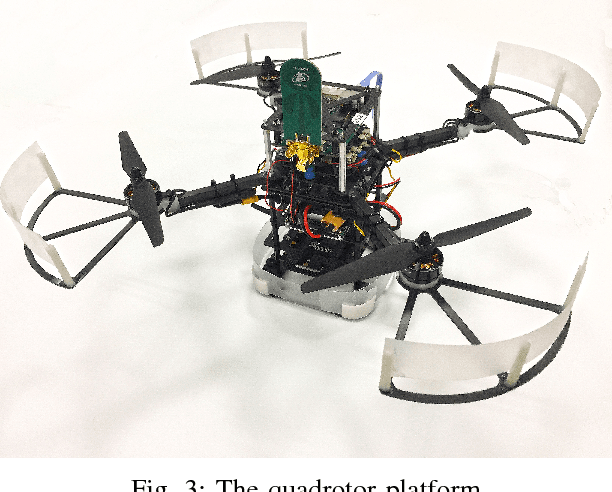
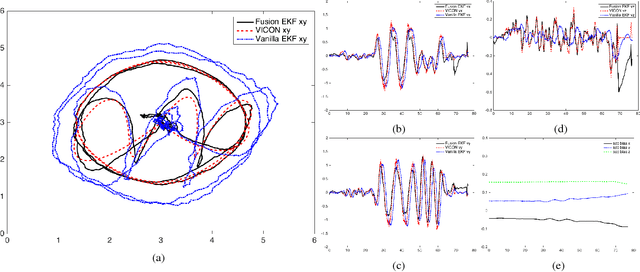
Driven by applications like Micro Aerial Vehicles (MAVs), driver-less cars, etc, localization solution has become an active research topic in the past decade. In recent years, Ultra Wideband (UWB) emerged as a promising technology because of its impressive performance in both indoor and outdoor positioning. But algorithms relying only on UWB sensor usually result in high latency and low bandwidth, which is undesirable in some situations such as controlling a MAV. To alleviate this problem, an Extended Kalman Filter (EKF) based algorithm is proposed to fuse the Inertial Measurement Unit (IMU) and UWB, which achieved 80Hz 3D localization with significantly improved accuracy and almost no delay. To verify the effectiveness and reliability of the proposed approach, a swarm of 6 MAVs is set up to perform a light show in an indoor exhibition hall. Video and source codes are available at https://github.com/lijx10/uwb-localization