 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSample from What You See: Visuomotor Policy Learning via Diffusion Bridge with Observation-Embedded Stochastic Differential Equation
Dec 08, 2025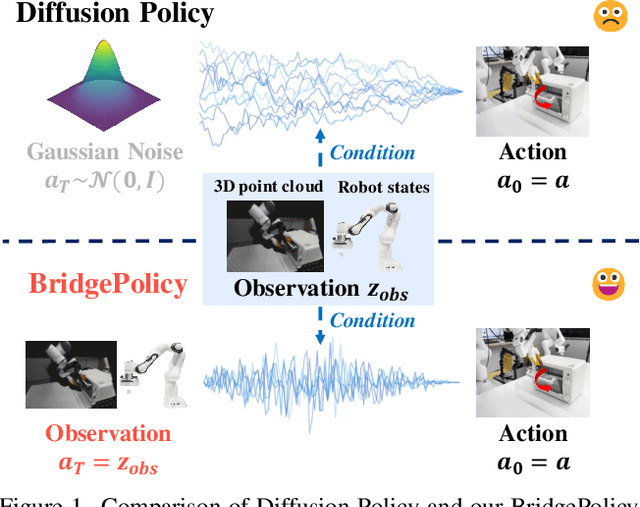
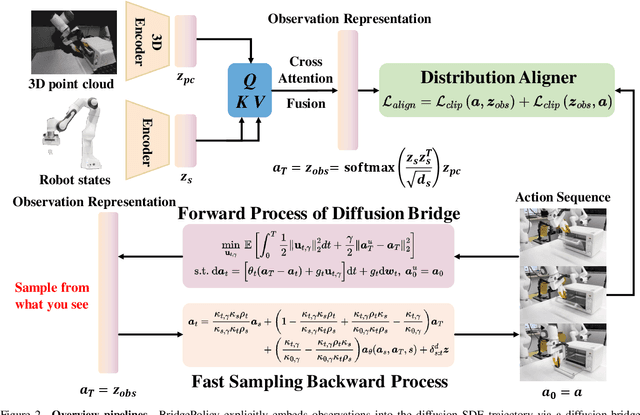
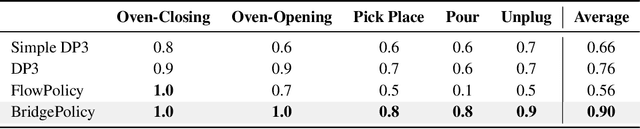
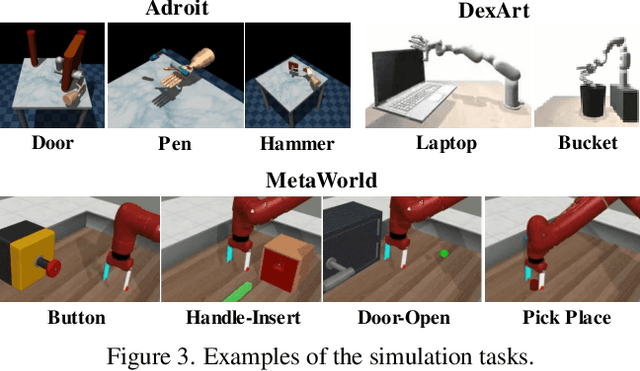
Imitation learning with diffusion models has advanced robotic control by capturing multi-modal action distributions. However, existing approaches typically treat observations as high-level conditioning inputs to the denoising network, rather than integrating them into the stochastic dynamics of the diffusion process itself. As a result, sampling must begin from random Gaussian noise, weakening the coupling between perception and control and often yielding suboptimal performance. We introduce BridgePolicy, a generative visuomotor policy that explicitly embeds observations within the stochastic differential equation via a diffusion-bridge formulation. By constructing an observation-informed trajectory, BridgePolicy enables sampling to start from a rich, informative prior rather than random noise, substantially improving precision and reliability in control. A key challenge is that classical diffusion bridges connect distributions with matched dimensionality, whereas robotic observations are heterogeneous and multi-modal and do not naturally align with the action space. To address this, we design a multi-modal fusion module and a semantic aligner that unify visual and state inputs and align observation and action representations, making the bridge applicable to heterogeneous robot data. Extensive experiments across 52 simulation tasks on three benchmarks and five real-world tasks demonstrate that BridgePolicy consistently outperforms state-of-the-art generative policies.
UniDB: A Unified Diffusion Bridge Framework via Stochastic Optimal Control
Feb 09, 2025



Recent advances in diffusion bridge models leverage Doob's $h$-transform to establish fixed endpoints between distributions, demonstrating promising results in image translation and restoration tasks. However, these approaches frequently produce blurred or excessively smoothed image details and lack a comprehensive theoretical foundation to explain these shortcomings. To address these limitations, we propose UniDB, a unified framework for diffusion bridges based on Stochastic Optimal Control (SOC). UniDB formulates the problem through an SOC-based optimization and derives a closed-form solution for the optimal controller, thereby unifying and generalizing existing diffusion bridge models. We demonstrate that existing diffusion bridges employing Doob's $h$-transform constitute a special case of our framework, emerging when the terminal penalty coefficient in the SOC cost function tends to infinity. By incorporating a tunable terminal penalty coefficient, UniDB achieves an optimal balance between control costs and terminal penalties, substantially improving detail preservation and output quality. Notably, UniDB seamlessly integrates with existing diffusion bridge models, requiring only minimal code modifications. Extensive experiments across diverse image restoration tasks validate the superiority and adaptability of the proposed framework. Our code is available at https://github.com/UniDB-SOC/UniDB/.
AffordDP: Generalizable Diffusion Policy with Transferable Affordance
Dec 04, 2024



Diffusion-based policies have shown impressive performance in robotic manipulation tasks while struggling with out-of-domain distributions. Recent efforts attempted to enhance generalization by improving the visual feature encoding for diffusion policy. However, their generalization is typically limited to the same category with similar appearances. Our key insight is that leveraging affordances--manipulation priors that define "where" and "how" an agent interacts with an object--can substantially enhance generalization to entirely unseen object instances and categories. We introduce the Diffusion Policy with transferable Affordance (AffordDP), designed for generalizable manipulation across novel categories. AffordDP models affordances through 3D contact points and post-contact trajectories, capturing the essential static and dynamic information for complex tasks. The transferable affordance from in-domain data to unseen objects is achieved by estimating a 6D transformation matrix using foundational vision models and point cloud registration techniques. More importantly, we incorporate affordance guidance during diffusion sampling that can refine action sequence generation. This guidance directs the generated action to gradually move towards the desired manipulation for unseen objects while keeping the generated action within the manifold of action space. Experimental results from both simulated and real-world environments demonstrate that AffordDP consistently outperforms previous diffusion-based methods, successfully generalizing to unseen instances and categories where others fail.