 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Survey on Verification and Validation, Testing and Evaluations of Neurosymbolic Artificial Intelligence
Jan 10, 2024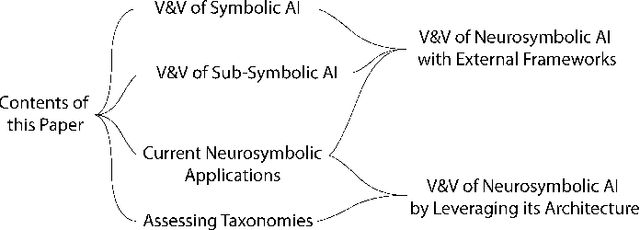



Neurosymbolic artificial intelligence (AI) is an emerging branch of AI that combines the strengths of symbolic AI and sub-symbolic AI. A major drawback of sub-symbolic AI is that it acts as a "black box", meaning that predictions are difficult to explain, making the testing & evaluation (T&E) and validation & verification (V&V) processes of a system that uses sub-symbolic AI a challenge. Since neurosymbolic AI combines the advantages of both symbolic and sub-symbolic AI, this survey explores how neurosymbolic applications can ease the V&V process. This survey considers two taxonomies of neurosymbolic AI, evaluates them, and analyzes which algorithms are commonly used as the symbolic and sub-symbolic components in current applications. Additionally, an overview of current techniques for the T&E and V&V processes of these components is provided. Furthermore, it is investigated how the symbolic part is used for T&E and V&V purposes in current neurosymbolic applications. Our research shows that neurosymbolic AI as great potential to ease the T&E and V&V processes of sub-symbolic AI by leveraging the possibilities of symbolic AI. Additionally, the applicability of current T&E and V&V methods to neurosymbolic AI is assessed, and how different neurosymbolic architectures can impact these methods is explored. It is found that current T&E and V&V techniques are partly sufficient to test, evaluate, verify, or validate the symbolic and sub-symbolic part of neurosymbolic applications independently, while some of them use approaches where current T&E and V&V methods are not applicable by default, and adjustments or even new approaches are needed. Our research shows that there is great potential in using symbolic AI to test, evaluate, verify, or validate the predictions of a sub-symbolic model, making neurosymbolic AI an interesting research direction for safe, secure, and trustworthy AI.
NoiseCAM: Explainable AI for the Boundary Between Noise and Adversarial Attacks
Mar 09, 2023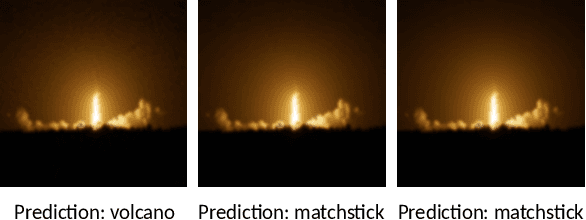
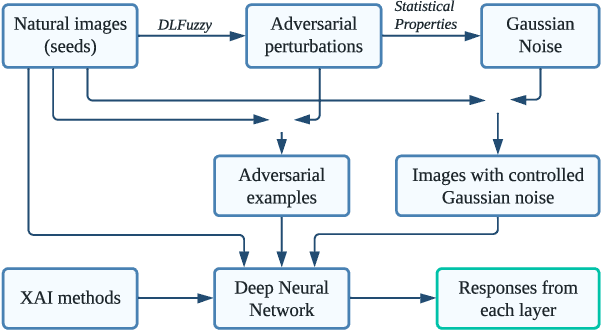
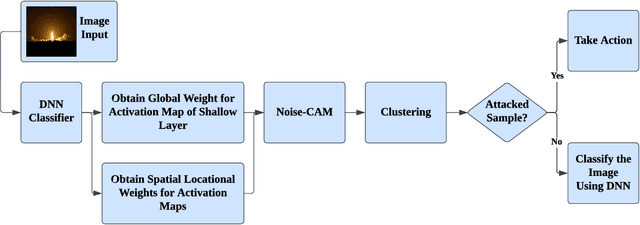
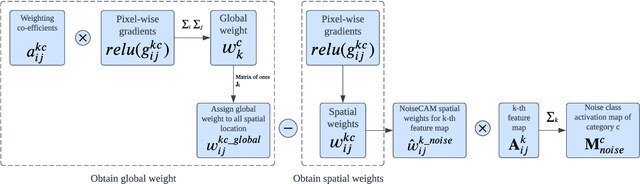
Deep Learning (DL) and Deep Neural Networks (DNNs) are widely used in various domains. However, adversarial attacks can easily mislead a neural network and lead to wrong decisions. Defense mechanisms are highly preferred in safety-critical applications. In this paper, firstly, we use the gradient class activation map (GradCAM) to analyze the behavior deviation of the VGG-16 network when its inputs are mixed with adversarial perturbation or Gaussian noise. In particular, our method can locate vulnerable layers that are sensitive to adversarial perturbation and Gaussian noise. We also show that the behavior deviation of vulnerable layers can be used to detect adversarial examples. Secondly, we propose a novel NoiseCAM algorithm that integrates information from globally and pixel-level weighted class activation maps. Our algorithm is susceptible to adversarial perturbations and will not respond to Gaussian random noise mixed in the inputs. Third, we compare detecting adversarial examples using both behavior deviation and NoiseCAM, and we show that NoiseCAM outperforms behavior deviation modeling in its overall performance. Our work could provide a useful tool to defend against certain adversarial attacks on deep neural networks.
Exploring Adversarial Attacks on Neural Networks: An Explainable Approach
Mar 08, 2023Deep Learning (DL) is being applied in various domains, especially in safety-critical applications such as autonomous driving. Consequently, it is of great significance to ensure the robustness of these methods and thus counteract uncertain behaviors caused by adversarial attacks. In this paper, we use gradient heatmaps to analyze the response characteristics of the VGG-16 model when the input images are mixed with adversarial noise and statistically similar Gaussian random noise. In particular, we compare the network response layer by layer to determine where errors occurred. Several interesting findings are derived. First, compared to Gaussian random noise, intentionally generated adversarial noise causes severe behavior deviation by distracting the area of concentration in the networks. Second, in many cases, adversarial examples only need to compromise a few intermediate blocks to mislead the final decision. Third, our experiments revealed that specific blocks are more vulnerable and easier to exploit by adversarial examples. Finally, we demonstrate that the layers $Block4\_conv1$ and $Block5\_cov1$ of the VGG-16 model are more susceptible to adversarial attacks. Our work could provide valuable insights into developing more reliable Deep Neural Network (DNN) models.