 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMaximize the Foot Clearance for a Hopping Robotic Leg Considering Motor Saturation
Jul 30, 2021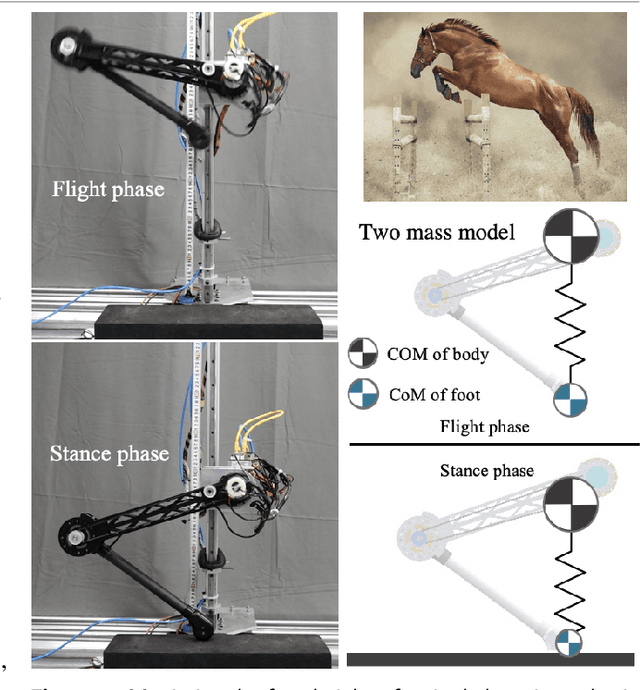
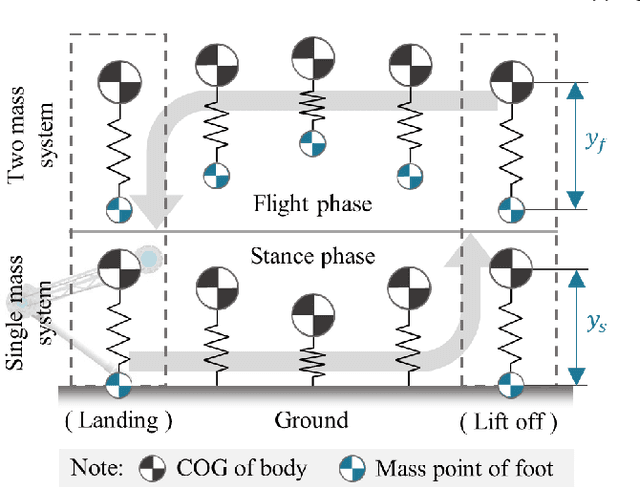
A hopping leg, no matter in legged animals or humans, usually behaves like a spring during the periodic hopping. Hopping like a spring is efficient and without the requirement of complicated control algorithms. Position and force control are two main methods to realize such a spring-like behaviour. The position control usually consumes the torque resources to ensure the position accuracy and compensate the tracking errors. In comparison, the force control strategy is able to maintain a high elasticity. Currently, the position and force control both leads to the discount of motor saturation ratio as well as the bandwidth of the control system, and thus attenuates the performance of the actuator. To augment the performance, this letter proposes a motor saturation strategy based on the force control to maximize the output torque of the actuator and realize the continuous hopping motion with natural dynamics. The proposed strategy is able to maximize the saturation ratio of motor and thus maximize the foot clearance of the single leg. The dynamics of the two-mass model is utilized to increase the force bandwidth and the performance of the actuator. A single leg with two degrees of freedom is designed as the experiment platform. The actuator consists of a powerful electric motor, a harmonic gear and encoder. The effectiveness of this method is verified through simulations and experiments using a robotic leg actuated by powerful high reduction ratio actuators.
High-Payload Online Identification and Adaptive Control for an Electrically-actuated Quadruped Robot
Jul 26, 2021
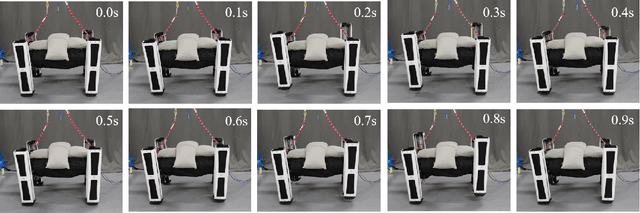
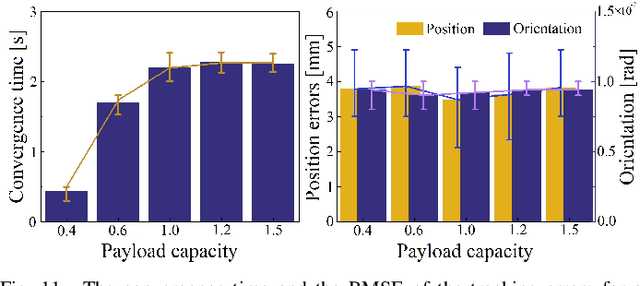
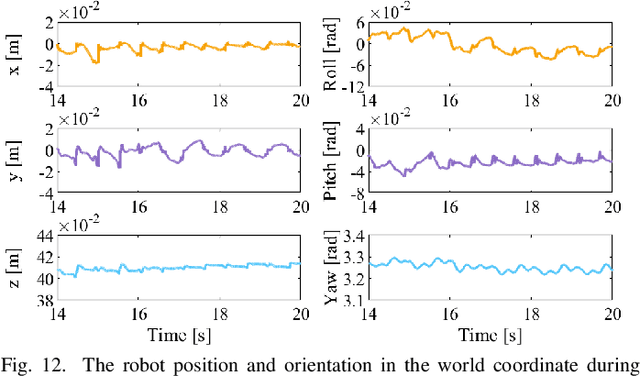
Quadruped robots manifest great potential to traverse rough terrains with payload. Numerous traditional control methods for legged dynamic locomotion are model-based and exhibit high sensitivity to model uncertainties and payload variations. Therefore, high-performance model parameter estimation becomes indispensable. However, the inertia parameters of payload are usually unknown and dynamically changing when the quadruped robot is deployed in versatile tasks. To address this problem, online identification of the inertia parameters and the Center of Mass (CoM) position of the payload for the quadruped robots draw an increasing interest. This study presents an adaptive controller based on the online payload identification for the high payload capacity (the ratio between payload and robot's self-weight) quadruped locomotion. We name it as Adaptive Controller for Quadruped Locomotion (ACQL), which consists of a recursive update law and a control law. ACQL estimates the external forces and torques induced by the payload online. The estimation is incorporated in inverse-dynamics-based Quadratic Programming (QP) to realize a trotting gait. As such, the tracking accuracy of the robot's CoM and orientation trajectories are improved. The proposed method, ACQL, is verified in a real quadruped robot platform. Experiments prove the estimation efficacy for the payload weighing from 20 kg to 75 kg and loaded at different locations of the robot's torso.