 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGC-Fed: Gradient Centralized Federated Learning with Partial Client Participation
Mar 17, 2025Multi-source information fusion (MSIF) leverages diverse data streams to enhance decision-making, situational awareness, and system resilience. Federated Learning (FL) enables MSIF while preserving privacy but suffers from client drift under high data heterogeneity, leading to performance degradation. Traditional mitigation strategies rely on reference-based gradient adjustments, which can be unstable in partial participation settings. To address this, we propose Gradient Centralized Federated Learning (GC-Fed), a reference-free gradient correction method inspired by Gradient Centralization (GC). We introduce Local GC and Global GC, applying GC during local training and global aggregation, respectively. Our hybrid GC-Fed approach selectively applies GC at the feature extraction layer locally and at the classifier layer globally, improving training stability and model performance. Theoretical analysis and empirical results demonstrate that GC-Fed mitigates client drift and achieves state-of-the-art accuracy gains of up to 20% in heterogeneous settings.
FedShift: Tackling Dual Heterogeneity Problem of Federated Learning via Weight Shift Aggregation
Feb 02, 2024Federated Learning (FL) offers a compelling method for training machine learning models with a focus on preserving data privacy. The presence of system heterogeneity and statistical heterogeneity, recognized challenges in FL, arises from the diversity of client hardware, network, and dataset distribution. This diversity can critically affect the training pace and the performance of models. While many studies address either system or statistical heterogeneity by introducing communication-efficient or stable convergence algorithms, addressing these challenges in isolation often leads to compromises due to unaddressed heterogeneity. In response, this paper introduces FedShift, a novel algorithm designed to enhance both the training speed and the models' accuracy in a dual heterogeneity scenario. Our solution can improve client engagement through quantization and mitigate the adverse effects on performance typically associated with quantization by employing a shifting technique. This technique has proven to enhance accuracy by an average of 3.9% in diverse heterogeneity environments.
Dynamic Flex-and-Flip Manipulation of Deformable Linear Objects
Apr 02, 2023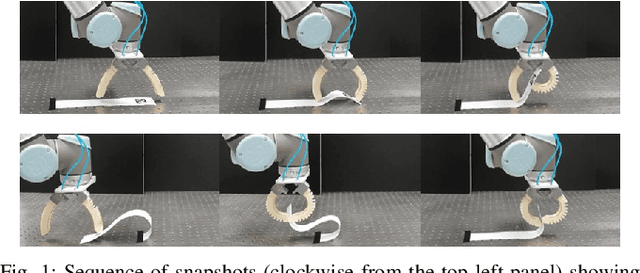
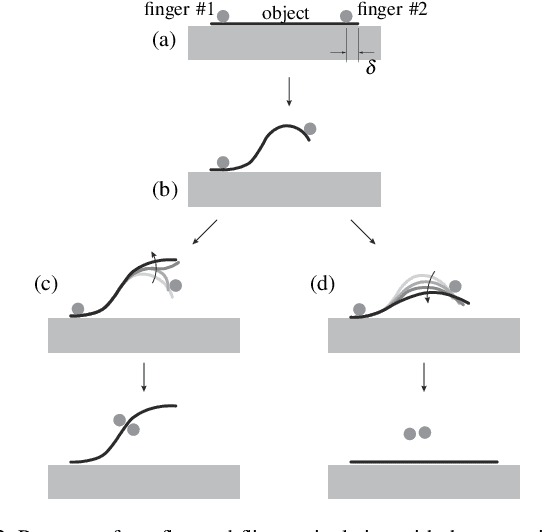
This paper presents the technique of flex-and-flip manipulation. It is suitable for grasping thin, flexible linear objects lying on a flat surface. During the manipulation process, the object is first flexed by a robotic gripper whose fingers are placed on top of it, and later the increased internal energy of the object helps the gripper obtain a stable pinch grasp while the object flips into the space between the fingers. The dynamic interaction between the flexible object and the gripper is elaborated by analyzing how energy is exchanged. We also discuss the condition on friction to prevent loss of contact. Our flex-and-flip manipulation technique can be implemented with open-loop control and lends itself to underactuated, compliant finger mechanism. A set of experiments in robotic page turning performed with our customized hardware and software system demonstrates the effectiveness and robustness of the manipulation technique.
* 6 pages,8 figures, 2 tables
Planning for Dexterous Ungrasping: Secure Ungrasping through Dexterous Manipulation
Aug 31, 2021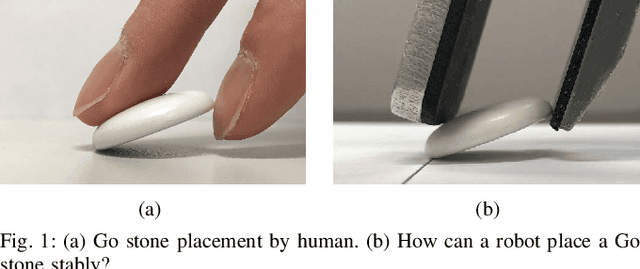

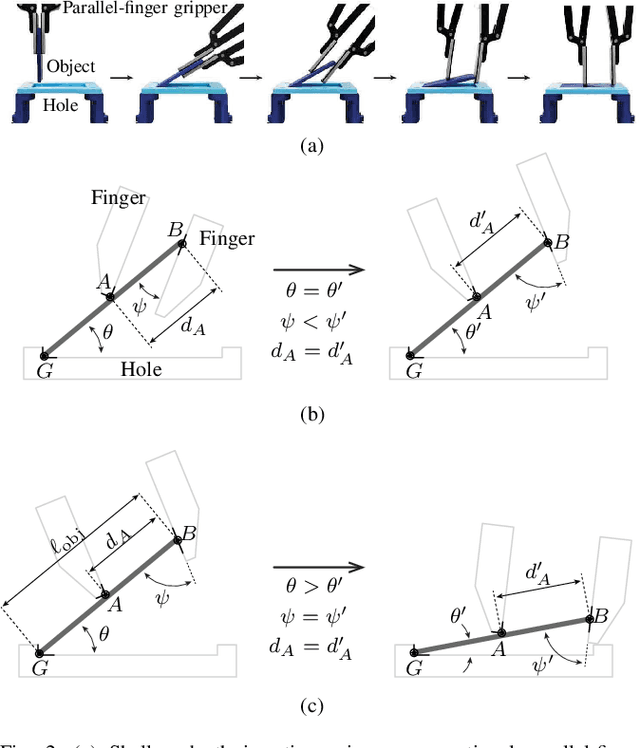
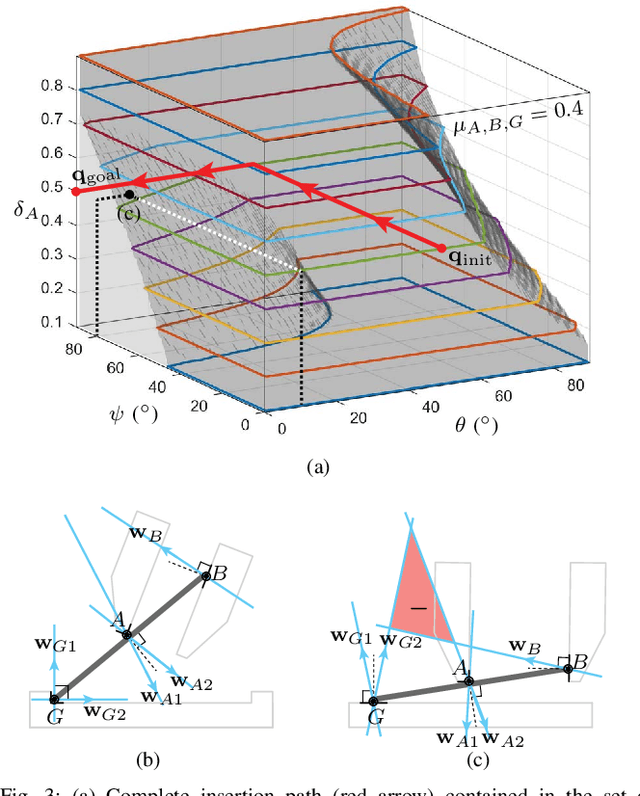
This paper presents a robotic manipulation technique for dexterous ungrasping. It refers to the capability of securely transferring a grasped object from the gripper to the robot's environment, i.e. the inverse of grasping or picking, through dexterous manipulation. The game of Go offers an example: consider how the player would typically place an initially pinch-grasped stone onto the board through the dexterous interaction between the fingers, the stone, and the board. Likewise, dexterous ungrasping addresses the necessity of changing the object's configuration relative to the gripper or the environment in order to securely keep hold of the object. In particular, we present a planning framework for determining a feasible minimum-cost motion path that completes dexterous ungrasping. Digit asymmetry in a gripper, i.e. difference in digit lengths, is discovered as the key to feasible and secure ungrasping. A set of experiments show the effectiveness of dexterous ungrasping in practical placement tasks.