 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePicking by Tilting: In-Hand Manipulation for Object Picking using Effector with Curved Form
Nov 25, 2024This paper presents a robotic in-hand manipulation technique that can be applied to pick an object too large to grasp in a prehensile manner, by taking advantage of its contact interactions with a curved, passive end-effector, and two flat support surfaces. First, the object is tilted up while being held between the end-effector and the supports. Then, the end-effector is tucked into the gap underneath the object, which is formed by tilting, in order to obtain a grasp against gravity. In this paper, we first examine the mechanics of tilting to understand the different ways in which the object can be initially tilted. We then present a strategy to tilt up the object in a secure manner. Finally, we demonstrate successful picking of objects of various size and geometry using our technique through a set of experiments performed with a custom-made robotic device and a conventional robot arm. Our experiment results show that object picking can be performed reliably with our method using simple hardware and control, and when possible, with appropriate fixture design.
Dynamic Flex-and-Flip Manipulation of Deformable Linear Objects
Apr 02, 2023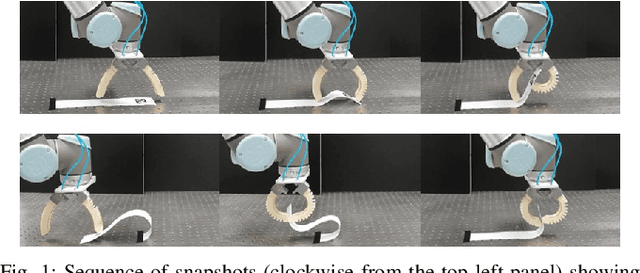
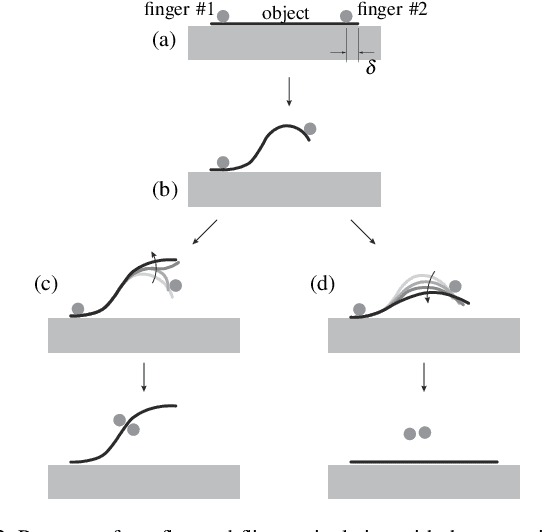
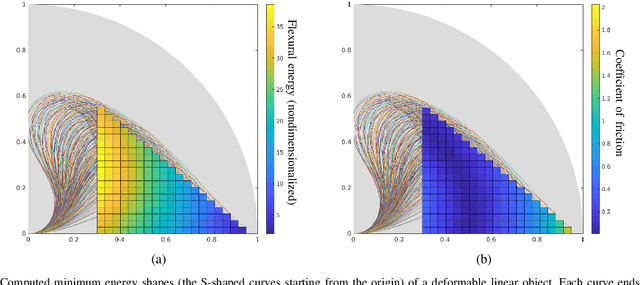
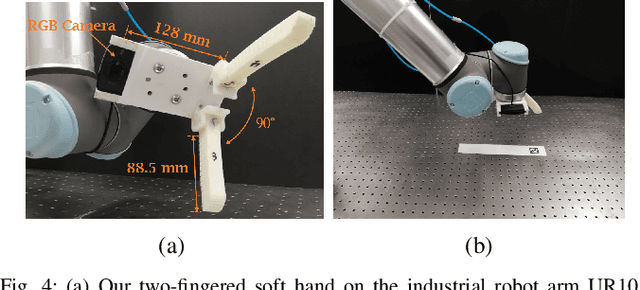
This paper presents the technique of flex-and-flip manipulation. It is suitable for grasping thin, flexible linear objects lying on a flat surface. During the manipulation process, the object is first flexed by a robotic gripper whose fingers are placed on top of it, and later the increased internal energy of the object helps the gripper obtain a stable pinch grasp while the object flips into the space between the fingers. The dynamic interaction between the flexible object and the gripper is elaborated by analyzing how energy is exchanged. We also discuss the condition on friction to prevent loss of contact. Our flex-and-flip manipulation technique can be implemented with open-loop control and lends itself to underactuated, compliant finger mechanism. A set of experiments in robotic page turning performed with our customized hardware and software system demonstrates the effectiveness and robustness of the manipulation technique.
* 6 pages,8 figures, 2 tables