 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDynamic Flex-and-Flip Manipulation of Deformable Linear Objects
Paper and Code
Apr 02, 2023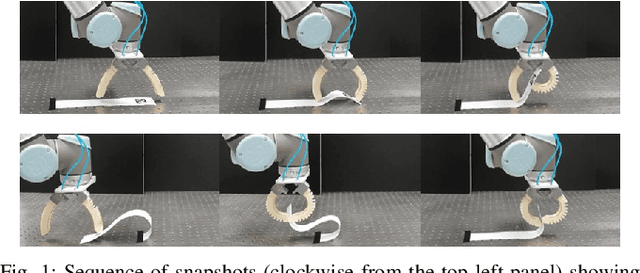
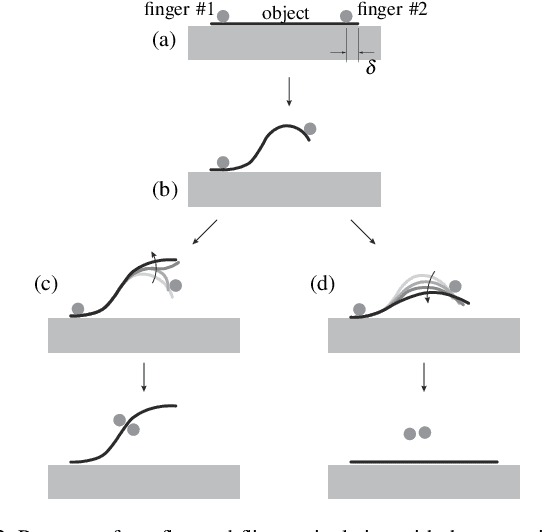
This paper presents the technique of flex-and-flip manipulation. It is suitable for grasping thin, flexible linear objects lying on a flat surface. During the manipulation process, the object is first flexed by a robotic gripper whose fingers are placed on top of it, and later the increased internal energy of the object helps the gripper obtain a stable pinch grasp while the object flips into the space between the fingers. The dynamic interaction between the flexible object and the gripper is elaborated by analyzing how energy is exchanged. We also discuss the condition on friction to prevent loss of contact. Our flex-and-flip manipulation technique can be implemented with open-loop control and lends itself to underactuated, compliant finger mechanism. A set of experiments in robotic page turning performed with our customized hardware and software system demonstrates the effectiveness and robustness of the manipulation technique.