 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePicking by Tilting: In-Hand Manipulation for Object Picking using Effector with Curved Form
Nov 25, 2024This paper presents a robotic in-hand manipulation technique that can be applied to pick an object too large to grasp in a prehensile manner, by taking advantage of its contact interactions with a curved, passive end-effector, and two flat support surfaces. First, the object is tilted up while being held between the end-effector and the supports. Then, the end-effector is tucked into the gap underneath the object, which is formed by tilting, in order to obtain a grasp against gravity. In this paper, we first examine the mechanics of tilting to understand the different ways in which the object can be initially tilted. We then present a strategy to tilt up the object in a secure manner. Finally, we demonstrate successful picking of objects of various size and geometry using our technique through a set of experiments performed with a custom-made robotic device and a conventional robot arm. Our experiment results show that object picking can be performed reliably with our method using simple hardware and control, and when possible, with appropriate fixture design.
Why-So-Deep: Towards Boosting Previously Trained Models for Visual Place Recognition
Jan 10, 2022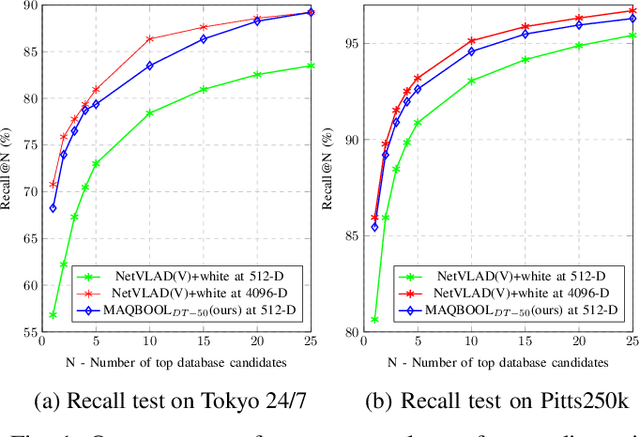
Deep learning-based image retrieval techniques for the loop closure detection demonstrate satisfactory performance. However, it is still challenging to achieve high-level performance based on previously trained models in different geographical regions. This paper addresses the problem of their deployment with simultaneous localization and mapping (SLAM) systems in the new environment. The general baseline approach uses additional information, such as GPS, sequential keyframes tracking, and re-training the whole environment to enhance the recall rate. We propose a novel approach for improving image retrieval based on previously trained models. We present an intelligent method, MAQBOOL, to amplify the power of pre-trained models for better image recall and its application to real-time multiagent SLAM systems. We achieve comparable image retrieval results at a low descriptor dimension (512-D), compared to the high descriptor dimension (4096-D) of state-of-the-art methods. We use spatial information to improve the recall rate in image retrieval on pre-trained models.