 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeClusterGNN: Cluster-based Coarse-to-Fine Graph Neural Network for Efficient Feature Matching
Apr 25, 2022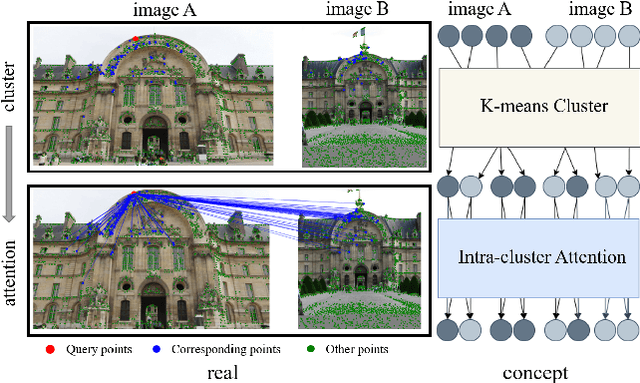
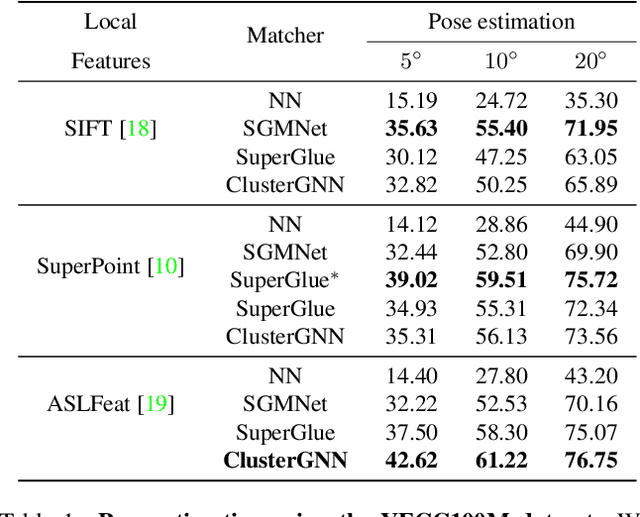
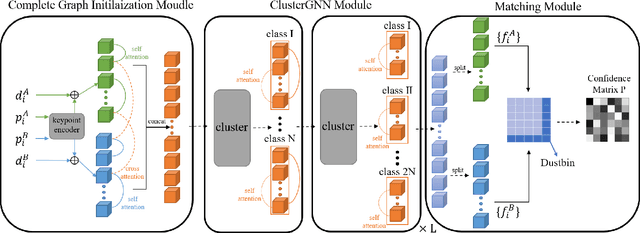
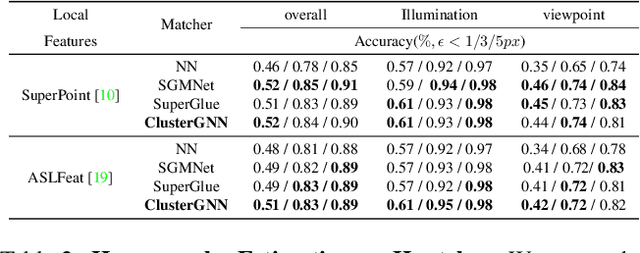
Graph Neural Networks (GNNs) with attention have been successfully applied for learning visual feature matching. However, current methods learn with complete graphs, resulting in a quadratic complexity in the number of features. Motivated by a prior observation that self- and cross- attention matrices converge to a sparse representation, we propose ClusterGNN, an attentional GNN architecture which operates on clusters for learning the feature matching task. Using a progressive clustering module we adaptively divide keypoints into different subgraphs to reduce redundant connectivity, and employ a coarse-to-fine paradigm for mitigating miss-classification within images. Our approach yields a 59.7% reduction in runtime and 58.4% reduction in memory consumption for dense detection, compared to current state-of-the-art GNN-based matching, while achieving a competitive performance on various computer vision tasks.
Subdivision-Based Mesh Convolution Networks
Jun 04, 2021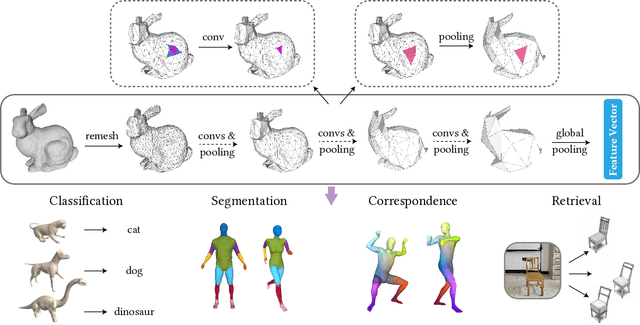
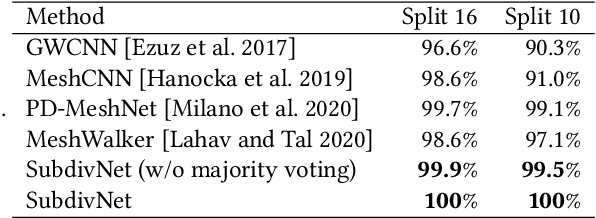
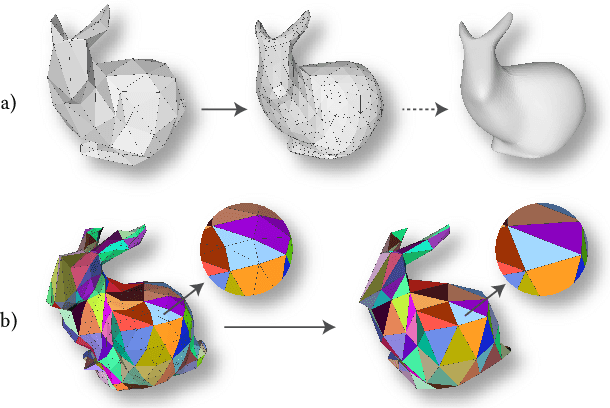
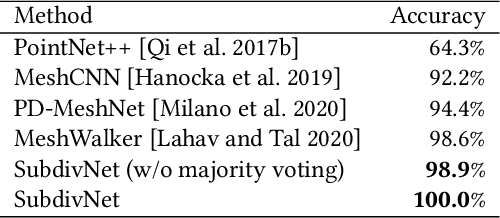
Convolutional neural networks (CNNs) have made great breakthroughs in 2D computer vision. However, the irregular structure of meshes makes it hard to exploit the power of CNNs directly. A subdivision surface provides a hierarchical multi-resolution structure, and each face in a closed 2-manifold triangle mesh is exactly adjacent to three faces. Motivated by these two properties, this paper introduces a novel and flexible CNN framework, named SubdivNet, for 3D triangle meshes with Loop subdivision sequence connectivity. Making an analogy between mesh faces and pixels in a 2D image allows us to present a mesh convolution operator to aggregate local features from adjacent faces. By exploiting face neighborhoods, this convolution can support standard 2D convolutional network concepts, e.g. variable kernel size, stride, and dilation. Based on the multi-resolution hierarchy, we propose a spatial uniform pooling layer which merges four faces into one and an upsampling method which splits one face into four. As a result, many popular 2D CNN architectures can be readily adapted to processing 3D meshes. Meshes with arbitrary connectivity can be remeshed to hold Loop subdivision sequence connectivity via self-parameterization, making SubdivNet a general approach. Experiments on mesh classification, segmentation, correspondence, and retrieval from the real-world demonstrate the effectiveness and efficiency of SubdivNet.
PCT: Point Cloud Transformer
Dec 17, 2020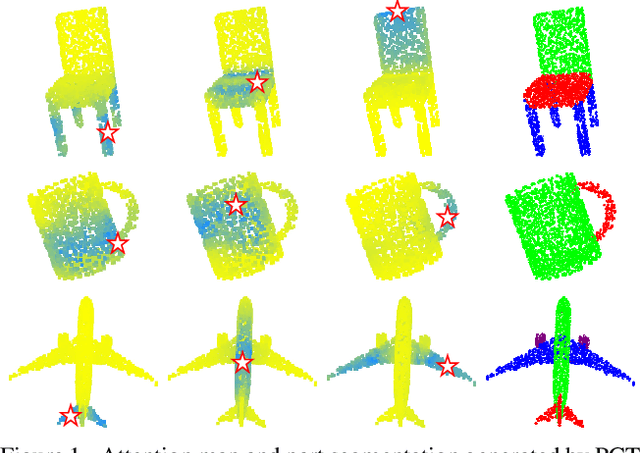
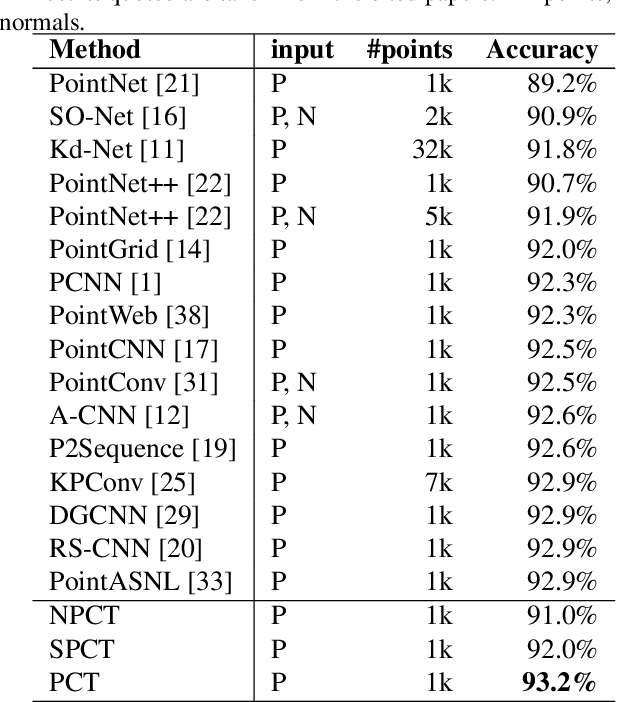

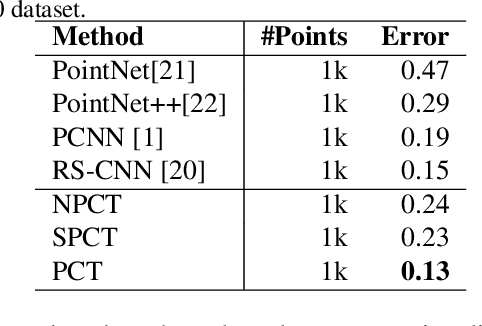
The irregular domain and lack of ordering make it challenging to design deep neural networks for point cloud processing. This paper presents a novel framework named Point Cloud Transformer(PCT) for point cloud learning. PCT is based on Transformer, which achieves huge success in natural language processing and displays great potential in image processing. It is inherently permutation invariant for processing a sequence of points, making it well-suited for point cloud learning. To better capture local context within the point cloud, we enhance input embedding with the support of farthest point sampling and nearest neighbor search. Extensive experiments demonstrate that the PCT achieves the state-of-the-art performance on shape classification, part segmentation and normal estimation tasks.